If you are a ROS developer/user and you blog about it, ROS wants those contributions on this page ! All you need for that to happen is:
have an RSS/Atom blog (no Tweeter/Facebook/Google+ posts)
open a pull request on planet.ros tracker indicating your name and your RSS feed/ATOM url. (You can just edit the file and click "Propose File Change" to open a pull request.)
make your ROS related posts tagged with any of the following categories: "ROS", "R.O.S.", "ros", "r.o.s."
Warnings
For security reasons, html iframe, embed, object, javascript will be stripped out. Only Youtube videos in object and embed will be kept.
Guidelines
Planet ROS is one of the public faces of ROS and is read by users and potential contributors. The content remains the opinion of the bloggers but Planet ROS reserves the right to remove offensive posts.
Blogs should be related to ROS but that does not mean they should be devoid of personal subjects and opinions : those are encouraged since Planet ROS is a chance to know more about ROS developers.
Posts can be positive and promote ROS, or constructive and describe issues but should not contain useless flaming opinions. We want to keep ROS welcoming :)
ROS covers a wide variety of people and cultures. Profanities, prejudice, lewd comments and content likely to offend are to be avoided. Do not make personal attacks or attacks against other projects on your blog.
Suggestions ?
If you find any bug or have any suggestion, please file a bug on the planet.ros tracker.
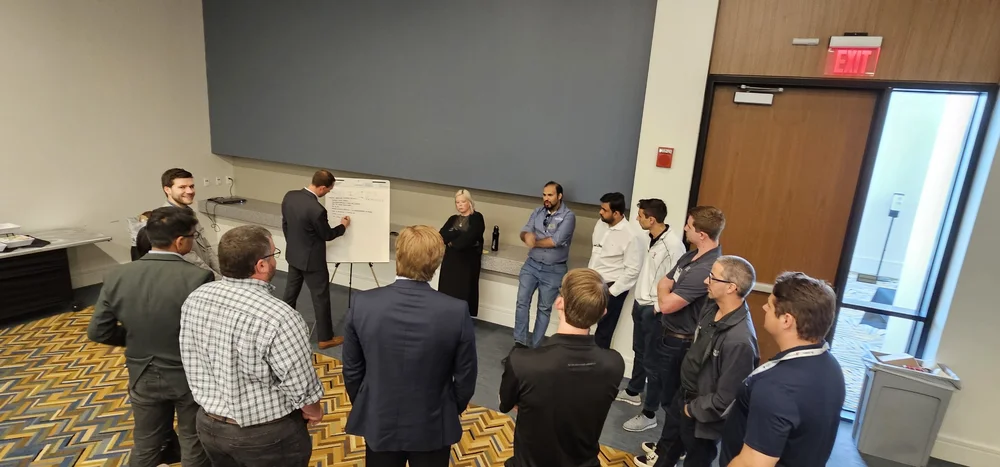
The ROS-Industrial Consortium Americas Annual Meeting 2025 was recently held and designed to gather Consortium members and stakeholders to review recent advancements, share initiatives, and discuss the strategic direction of the ROS-Industrial open source project. The meeting included a combination of presentations, workshops, and discussions aimed at promoting the growth and development of the ROS-Industrial project’s resources and to broaden community and stakeholder engagement. This meeting was the capstone to a full week of networking including a social meetup and welcome dinner.
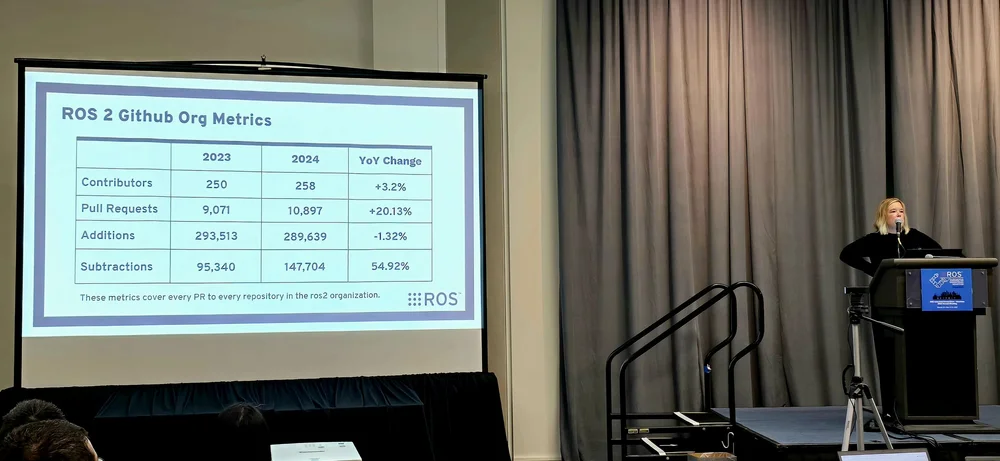
The annual meeting began with a welcome address and a state-of-the-consortium presentation by Matt Robinson, Program Manager, & Michael Ripperger, Technical Lead for the ROS-I Consortium Americas at SwRI. They provided updates on the latest developments, resources provided, and upcoming initiatives aligned with the Consortium's objectives. From here overviews of recent developments by the ROS-I Consortium European Union and ROS-I Consortium Asia-Pacific (AP) were shared. Yasmine Makkaoui, Scientific Coordinator with Fraunhofer IPA detailed updates for ROS 2 support and documentation to assist robotic manipulator providers in creation of ROS 2 hardware interfaces. Maria Vergo of Advanced Remanufacturing Technology Centre (ARTC) shared the ROS-I Consortium AP contributions around Open RMF 2.0 and recent successes in collaboration with their membership.
From here collaborators on key core open source projects, advanced robotics tool sets and funding robotics programs shared their latest developments. Kat Scott from Intrinsic provided the latest updates related to the ROS 2 Kilted Kaiju release, which contains a lot of new features including Zenoh as a Tier 1 RMW, and an improved RCLPy that contains a new events executor that has improved performance.
Dave Grant, CEO, and Dave Coleman Chief Prodcut Officer & Founder of PickNik Robotics, provided updates around MoveIt Pro and the new capabilities they are putting into production. Dave Coleman also spent time sharing the decisions around PickNik support for MoveIt 2, which has been limited in recent months as their team has focused on MoveIt Pro. A community wide effort is ongoing to build up support for MoveIt 2 and PickNick has recently put out a call for additional MoveIt 2 support. We look forward to collaborating with PickNik and the broader open source community to keep MoveIt 2 strong and healthy!
Finally, the morning session wrapped up with Miguel Rodriguez, Programs Manager at the ARM Institute, the latest programs and opportunities for collaboration within the ARM ecosystem. They also provided additional opportunities, or project calls, around Artificial Intelligence and Casting and Foundry solutions which week to provide funding to address core gaps in the industrial robotics space.
The keynote for the day was provided by Andrew Roberts of Spirit AeroSystems, where he shared the Spirit story around bringing ROS and now ROS 2, to their collaborating universities and how they manage sustaining education that is relevant to their future automation goals that leverage ROS 2. Via internships and collaboration with Wichita State University’s National Institute for Aviation Research (NIAR), they are encouraging a university provided pipeline or ROS-ready students to continue their advanced robotics journey.
For the afternoon, several additional insightful presentations followed, including:
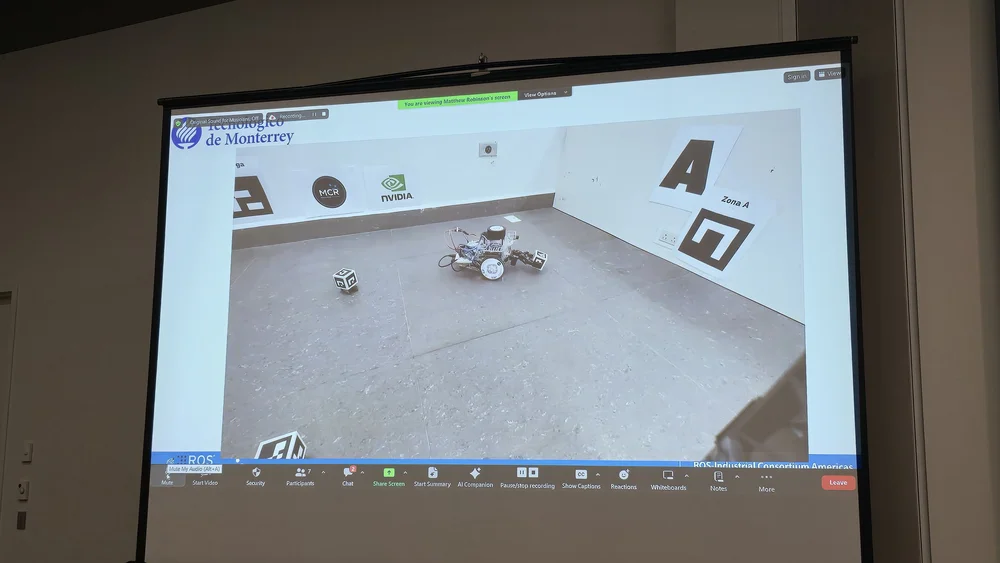
Prof. Alberto Munoz from EIC-Tec de Monterrey, who discussed "The Tec de Monterrey Model for Training the Next Generation of Engineers," emphasizing the importance of education in advancing robotics.
Logan McNeil, Applications Engineer at EWI, who presented on "The Challenges of Robot and Process Agnostic Methodologies for Convergent Manufacturing Applications”, diving into the details around challenges for true interoperability in the context of welding.
Eric Lattas, Staff Engineer at Fanuc, who introduced the "FANUC ROS 2 Driver," showcasing the integration and capabilities of ROS 2 within Fanuc systems.
Max Falcone, VP of Sales Engineering at PushCorp, who contributed to the discussion on industry challenges and solutions, on how PushCorp is providing more tools in their hardware to enable next generation finishing capabilties.
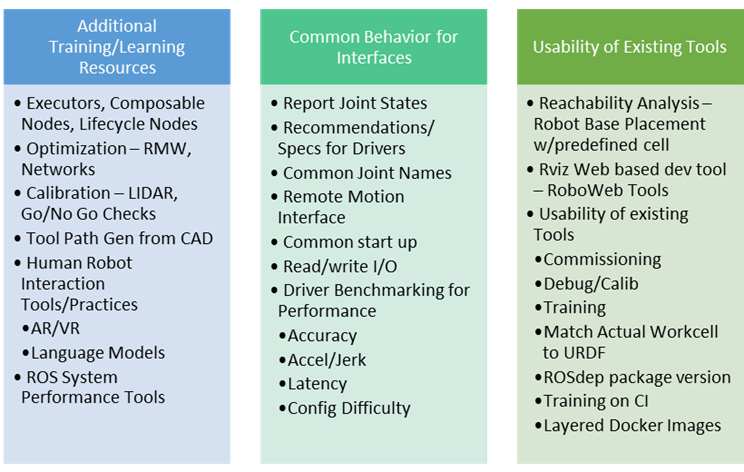
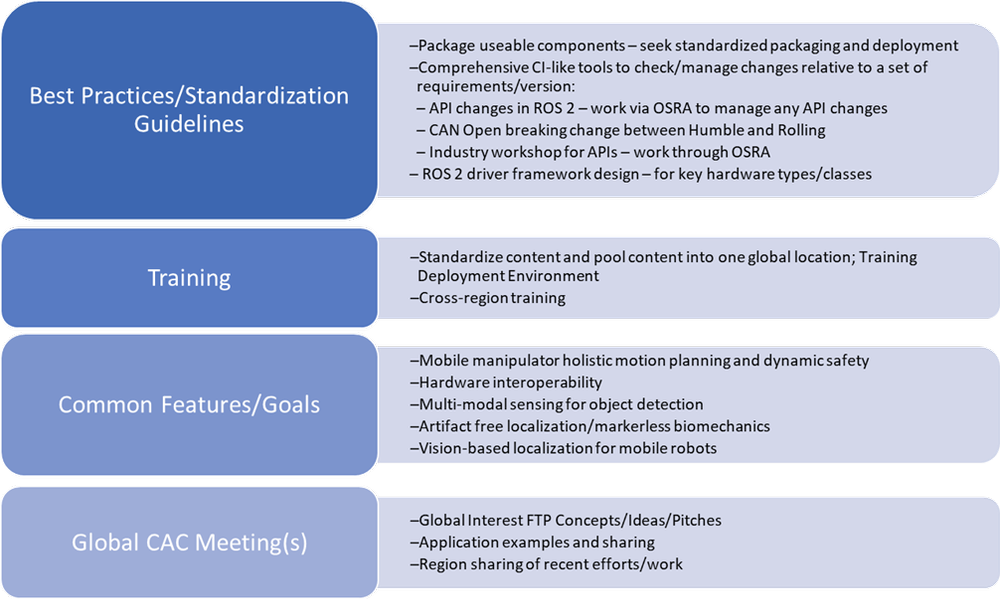
The meeting also included rotating workshops focusing on critical areas such as the ROS-I Roadmap and Prioritization, and the efficient leverage of developed resources for better utilization by OEMs. These workshops aimed to:
Review and throw rocks at the ROS-I Roadmap to align it better with the Consortium's goals.
Identify ways to improve the use and leverage of developed resources to enhance efficiency.
The day concluded with a summary of workshop outputs and closing remarks, reiterating the importance of active engagement from members and the community to realize the full potential of ROS-Industrial.
The whiteboard outputs from the workshops held at RIC Amercias annual meeting 2025
Immediate actions following the meeting include:
Continued engagement in ROS-Industrial events and regional meetings throughout the year.
Sharing the insights and feedback gained from the meeting within members' organizations.
Participation in collaborative efforts to address identified challenges and advance the strategic initiatives discussed during the event.
Overall, the ROS-Industrial Consortium Americas Annual Meeting 2025 provided a platform for meaningful exchanges and set the stage for future advancements in industrial robotics through a collaborative community effort.
Recordings for the various talks may be found in a playlist on the ROS-I YouTube channel. Thanks to everyone that has suppported open source for industry!
The previous significant update to the ROS-Industrial roadmap centered mainly on the technical capabilities in various areas, aiming to create a vibrant open-source robotics development ecosystem. The main challenge was the lack of detail regarding when these capabilities would become available, in an ever-changing technological landscape.
Since then, a more generalized vision has been shared, focusing on four broad areas of interest: Ease of Use, Advanced Capability, Interoperability, and Human Interface & Reaction. However, the challenge of integrating a time component and actual deliverables has persisted.
Vision for ros-i based on four pillars of ease of use, advanced capability, interoperability, and human robot interaction
Over the years, member and community feedback has aligned with these four pillars. We have been collaborating with members to improve and distill these elements into manageable components that can be delivered within a reasonable timeframe. The requests from the 2023 ROS-Industrial workshops reflect this ongoing effort.
community feedback via regular workshops
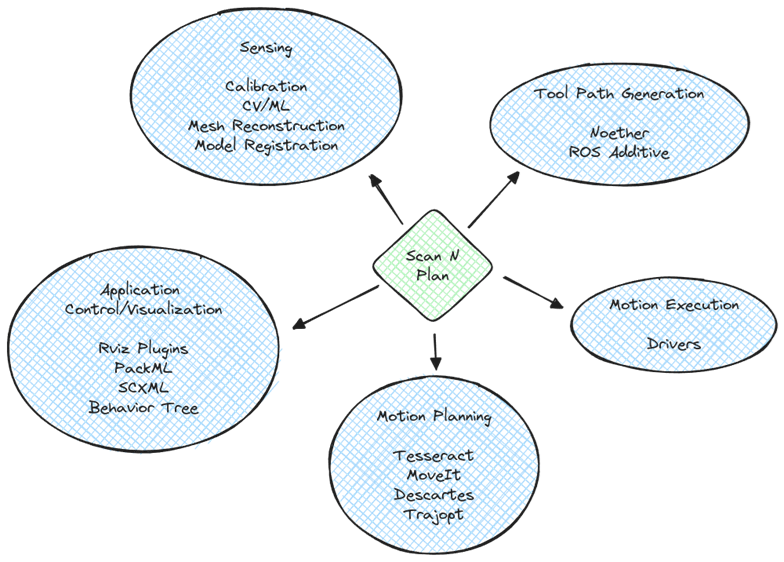
In recent years there has been a pivot to think more towards building frameworks and modular components that enable applications to be developed with minimal custom code. The vision is a toolbox of intuitive and useful robotics modules, exemplified by the Scan-N-Plan initiative. This approach has led to more reusable code and greater flexibility.
The ROS-Industrial project has always sought to bring forward usable open source tools, but now with helping to improve the developer experience by:
Providing clear and cohesive concepts/interfaces
Offering easy-to-build and customizable modules
Ensuring decent documentation
Making it relatively simple to create specific applications
An example demonstrating this approach is Tesseract , a motion planning framework for industrial processing applications. Tesseract offers:
modules and the scan-n-plan framework
Abstract interfaces for core capabilities
Planning pipelines and capabilities as modules
Customizable plugins
Complex task pipelines
Meta-planning and visualization tools
Similarly, the noether repository for tool path planning has evolved to include:
Clear and cohesive interfaces
Numerous out-of-the-box capability modules
Mesh modification tools, tool path planners, and modifiers
Available graphical user interface and quick pipeline configurations
Customization and front-end presentation capabilities
Tutorials from the 2024 ROSCon workshop
And now Tesseract and noether also both include development checklsts towards release milestones or a roadmap, enabling improved visibility and collaboration on capability progression.
Progress through collaboration
The Robotic Blending Milestone 5 Focused Technical Project , sponsored by the Steel Founders’ Society of America, recently demonstrated significant advancements by leveraging and improving modularity. Key achievements of this program include:
Successful deployment at three sites with three distinct hardware setups:
Fisher Cast Steel (end-user)
Iowa State University (ISU)
Southwest Research Institute (SwRI)
Creation of an application example
Integration of contributions from ISU
Enhancement of capabilities and documentation for modules
Future Direction
We have begun the work to move towards the release of modules and frameworks with clearly defined, trackable lists of items to be completed before release. These module releases will include comprehensive documentation and additional basic application examples that may serve as templates. Additionally, we aim to create best practice documents, including guidelines for OEM Driver Creation.
Global Collaboration and Synergy
Global collaboration strategy developed by RIC AP and agreed upon in 2024
This progress aligns with the global collaboration vision developed and shared in 2024 within each ROS-Industrial Consortia region. The ROS-Industrial Consortia Global Workplan, developed by the ROS-Industrial Asia-Pacific team in late 2024, highlights areas of synergy across regions. This plan seeks to optimize outcomes for all members by reducing redundancy and making efficient use of global resources.
Community Engagement
The updated ROS-Industrial roadmap will be a central focus at the upcoming 2025 RIC Americas Annual Meeting. We encourage current members and those interested in membership to participate in this event. There will be opportunities for broader community engagement and feedback following the publication of the workshop outcomes.
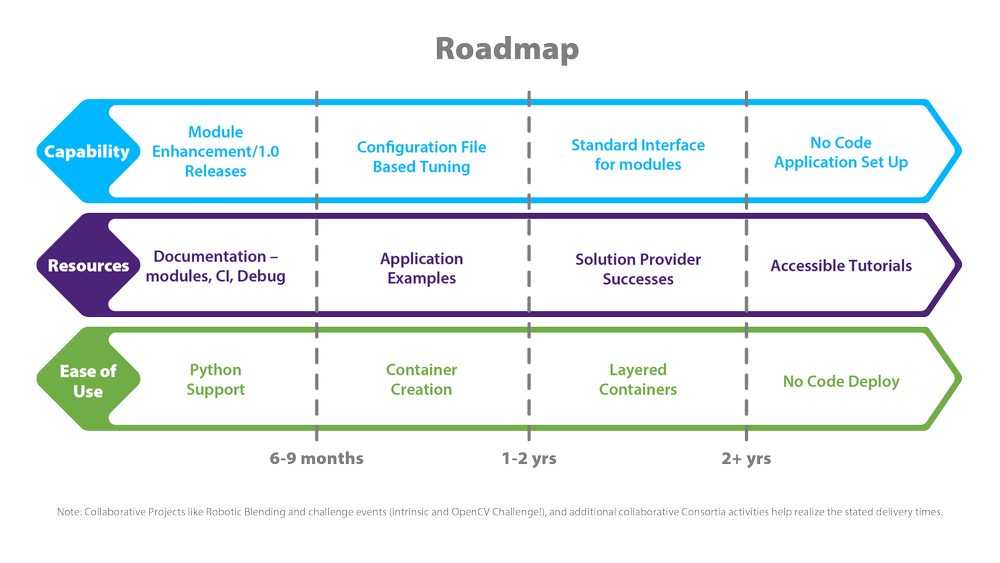
draft ros-i roadmap 2025
A living vision and roadmap
We look forward to working with the global consortia supporting ROS-Industrial, our open source collaborators, and the broader community. Our goal is to continuously improve ROS-Industrial resources. We recognize that a dynamic program requires a living vision and roadmap, so stay tuned for updates and new capabilities that align with the evolving roadmap.
Once again, we extend our gratitude to those who have supported the ROS-Industrial open source project and everyone who has contributed to enhancing open source for industry.
If you’re diving into the world of robotics with ROS2 (Robot Operating System 2), setting up a solid foundation is crucial. A well-organized workspace and properly structured nodes are the backbone of any successful ROS project. Whether you’re a beginner or a seasoned developer, this guide will walk you through creating and managing a ROS2 […]
The ROS-Industrial Consortium Americas provided a hybrid, online/in-person, ROS 2 training October 22-24. The three-day ROS-I developers training class was given to trainees from across the ROS-Industrial Consortium membership.
Whether you are just starting to use or are already experienced in ROS 2, the training offered something for all levels. Newcomers learned the ropes, getting a solid foundation in the framework’s core concepts, while experienced developers delved into advanced topics such as advanced motion planning, including tuning optimization contsraint parameters.
Currently training is on ROS 2 Humble, delivered through an AWS EC2 instance. On the first day, the attendees were divided into two groups: beginner ROS developers and advanced ROS developers. The advanced group learned how to set up a basic motion planning pipeline in Tesseract, where they refined a planning pipeline increasing robustness. By the end of the day students were adding unique customizations to the pipeline.
The beginner group focused on learning the fundamentals of ROS 2, including workspace structure and best practices for adding scripts and building the workspace. They also learned about creating packages / nodes, topics (publishers / subscribers), messages, services, actions, launch files and command line parameters.
Day 2, groups gathered to learn how to develop URDF/XACROs to describe a robot, as well as how to use TFs and create a MoveIt package for an industrial robot for motion planning in a simulation environment.
Day 3 started with a tour that focused on ROS 2 robotic systems within the Robotics Department at SwRI, where the instructors were able to give insights on the capabilities of ROS 2 in more tangible working industrial examples.
In person attendees stepping through the scan-n-plan workshop demonstration
Wrapping up the training participants were given the opportunity to share with instructors and the group how they intended to use ROS in their projects and where already under way the instructors were able to provide additional assistance to address issues in their application development back home.
Hybrid training always presents challenges in making sure those online get the same attention as those in the room. However, it was rewarding to assist attendees in getting deeper into ROS 2, whether they were just starting out or wanting to expand their solution set or add features to an ongoing project. As always, as instructors, we always look forward to seeing how they apply these new skills and always look forward to interacting through the repositories or various ROS/ROS-I collaborative events.
The ROS-Industrial Consortium Asia Pacific Annual Summit 2024, themed "Robotics in the Age of AI," concluded successfully, marking a significant milestone for the robotics and automation sector in Asia Pacific. Hosted by the ROS-Industrial Consortium Asia Pacific (RIC Asia Pacific) and managed by the Advanced Remanufacturing and Technology Center (ARTC), the summit brought together over 150 international participants, including industry leaders, researchers, and innovators, who gathered to explore the impact of AI-powered robotics on industries.
This year’s summit featured an impressive agenda packed with expert talks, hands-on masterclasses, and an engaging tech marketplace, all designed to highlight how AI is transforming robotics across industries, especially in manufacturing, logistics, and physical security.
Day 1 Highlights
The first day of the summit opened with a series of insightful presentations by leaders from major organizations in the AI and robotics space.
Amazon Web Services (AWS) set the tone with a talk titled "AI and Robotics-Driven Innovations for Manufacturing Excellence." Presented by Mirela Juravle, Data and AI Specialist Lead at AWS, the session showcased how robotics and AI are being leveraged to support digital transformation efforts toward achieving "lights-out" manufacturing, a concept where factories operate autonomously without human intervention. AWS shared insights on the benefits of cloud services in scaling robotic operations and optimizing workflows for increased efficiency in manufacturing.
Next, Mitsuharu Sonehara, Manager at IHI Corporation’s Technology Planning Department, presented on IHI's vision of advancing robotics and automation within logistics. Titled "From Deep Sea to Deep Space," his talk explored IHI's work in using robotics for high-stakes applications, from underwater operations to outer space logistics. He detailed the challenges and opportunities in these extreme environments and highlighted how AI and robotics can revolutionize logistics operations of the future.
Swarooph Nirmal Seshadri, Chief Technology Officer at Kabam Robotics, shared insights on the transformation of physical security through robotics, intelligence, and connectivity. His session explored how AI-driven robots are becoming crucial in the security industry, enabling smarter monitoring, data gathering, and response systems that are safer and more efficient.
Dr. Dikai Liu, a solution architect from NVIDIA, followed with an exciting presentation on NVIDIA’s suite of services, which facilitates the acceleration of robotics and AI from simulation to real-world deployment. NVIDIA’s tools and platforms empower developers to simulate complex environments and rapidly prototype AI algorithms for robotics, ultimately shortening the timeline from concept to deployment.
An important announcement on ROS2 compatibility came from Mr. Steven Chong, Senior Business Development Manager at Mitsubishi Electric Asia. He announced the release of a ROS2 driver for the MELFA robot, enabling broader integration with the ROS ecosystem. This advancement allows Mitsubishi Electric’s industrial robots to seamlessly integrate with ROS2, opening up new possibilities for automation in various industries. More details can be found on the ROS-Industrial blog here.
Wrapping up the first day’s talks, Dr. Yang Geng, Assistant Director at IMDA, presented on "Embodied AI as the Next Leap in GenAI." He described how embodied AI, which focuses on giving AI systems a physical presence, can revolutionize industries, from customer service robots to healthcare assistants, by enhancing interactions and adaptability through AI.
Day 2 Highlights
The second day of the summit was equally informative, beginning with a presentation by Matt Robinson, Consortium Manager at ROS-Industrial Consortium America. He discussed the collective global effort to standardize ROS2 drivers, aiming to establish ROS2 as the default industrial standard for robotics software. Robinson emphasized the benefits of this standardization for interoperability and efficiency in automation.
Following Robinson, Vishnuprasad Prachandabhanu, Consortium Manager of ROS-Industrial Consortium Europe, shared ongoing efforts to implement ROS2 across various applications. He highlighted a substantial EU-backed initiative with a €60 million funding commitment toward developing AI for robotics across Europe, signifying a significant investment in the advancement of open-source robotics.
Mr. Eugene Goh of JM Vistec presented next, offering insights on the integration of vision systems in robotics. His talk emphasized how JM Vistec enables robots to "see," enhancing precision and capability in industrial tasks, from quality inspection to object recognition.
Concluding the speaker sessions, Dr. Kenneth Kwok from IHPC shared cutting-edge research on enabling human-robot collaboration, powered by AI. His session emphasized the importance of human-centered AI in creating safe, efficient, and collaborative environments where robots can work alongside humans in factories, warehouses, and more.
Masterclass Lineup
Participants then moved to the masterclass sessions, which provided hands-on learning experiences across various aspects of AI and robotics. Each session was designed to deepen the practical knowledge and technical skills required for integrating AI with robotics.
Empowering Innovations with MELSOFT: Led by Mr. Liu Muyao, Software Application Engineer from Mitsubishi Electric Asia, this session focused on MELSOFT, Mitsubishi's integrated software environment, which enhances the control and flexibility of industrial robots.
Introduction to Reinforcement Learning for Robot Arm Manipulation: Hosted by Mr. Shalman Khan, Mr. Santosh Balaji, and Ms. Mercedes Ramesh from ROS-Industrial Consortium Asia Pacific, this session introduced reinforcement learning principles, showing participants how to apply these techniques to control robotic arms more effectively.
Introduction to Deep Learning with YOLO and ROS: Dr. Carlos Acosta, Robotics Specialist at Singapore Polytechnic, led a session on utilizing YOLO (You Only Look Once) with ROS for object detection. The masterclass offered participants a foundation in integrating deep learning algorithms with ROS to enhance robotic vision applications.
Introduction to Fleet Management with Open-RMF: This session, led by Dr. Ricardo Tellez, CEO of The Construct, demonstrated the Open-RMF (Robot Management Framework) for multi-robot fleet management. Participants learned how to manage multiple robots collaboratively, a critical capability for applications in large facilities like hospitals and factories.
Tech Marketplace Highlights
The tech marketplace featured a diverse array of participants, including Megazo, Kabam Robotics, IHPC, Parasoft, and Pepperl+Fuchs. Each company showcased their latest innovations, giving attendees a firsthand look at cutting-edge robotics solutions and AI-driven technologies designed to tackle challenges in industries like manufacturing, logistics, and safety. The marketplace provided a vibrant space for networking, collaboration, and discovering new tools that could redefine industrial automation.
RIC-AP Annual Summit 2024 also announce 2025 exciting event as we welcome the largest ROS Conference, ROSCon 2025 to Singapore. This would be the first time ROSCon will be hosted in Singapore
Finally, on behalf of everyone at ROS-Industrial Consortium Asia Pacific, we would like to thank all participants and delegates for their enthusiasm and we look forward to RIC-AP Annual summit 2025.
Mitsubishi Electric aims to integrate their MELFA robots into the ROS2 ecosystem, allowing robotics developers and integrators to utilize their industry proven platform seamlessly in ROS-based applications.
By developing MELFA ROS2 packages, Mitsubishi Electric seeks to enable developers to leverage on the flexibility, modularity, and extensive support of ROS2 community coupled with proven global hardware support.
MELFA ROS2 Driver is a collaborative effort between ROS-I Consortium Asia Pacific and Mitsubishi Electric Asia. MELFA ROS2 Driver consists of modular components that allow users to interface with the robot’s motion control, state monitoring, and digital/analog I/O operations in ROS2 control framework. This development bridges the gap between Mitsubishi Electric automation hardware and ROS2, providing developers with the tools needed to build, deploy, and manage robotic applications on an industrial platform effectively.
MELFA ROS2 Driver I/O controllers enable cyclic communication between ROS2 and MELFA. Developers can leverage on the IQ platform through MELFA ROS2 Driver to access other Mitsubishi Electric automation products (such as PLC, HMI, motor drives, NC machines), utilize industrial networks (such as CC-Link, PROFINET, EtherCAT, EtherNet/IP, DeviceNet, etc) and explore time sensitive networks (such as CC-Link IE TSN).
MELFA ROS2 Driver is designed for flexibility, supporting various ROS2 packages such as MoveIt2 for motion planning and custom nodes for specialized tasks.
MELFA ROS2 driver will officially support 9 models in the first batch and will aim to support more than 20 models in the near future
RV-2FR
RV-4FR
RV-4FRL
RV-7RL
RV-13FRL
RV-8CRL
RV-5AS
RH-6FRH5520
RH-6CRH6020
Users can access detailed documentation and installation instructions from the official repository to get started or talk to the developers from Mitsubishi Electric on Github discussions.
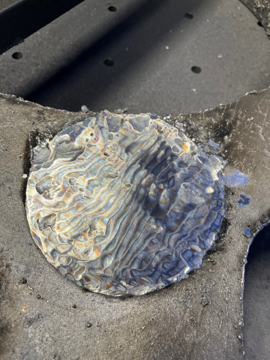
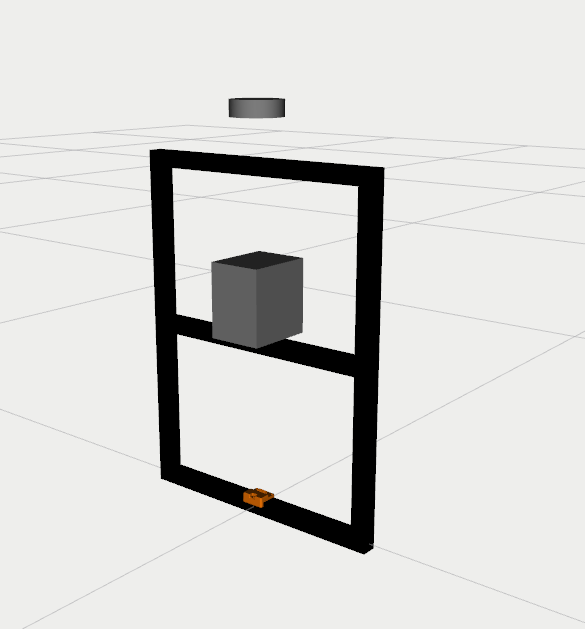
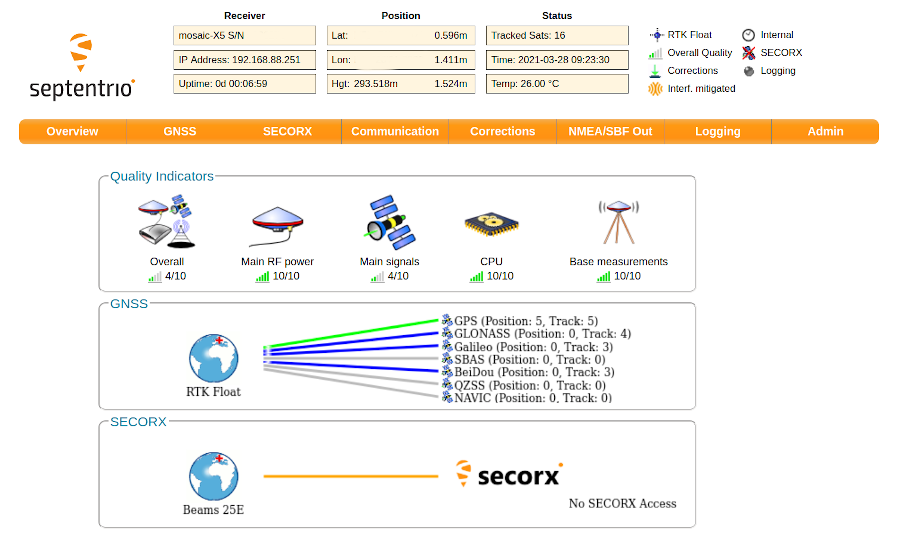
During the annual ROS-I Consortium Americas meeting in March, ORBBEC provided for evaluation to Southwest Research Institute (SwRI) a Femto Mega, a depth+RGBD camera. Since then, the ROS-I team has tested the performance of the Femto Mega within the standing Scan-N-Plan demo and qualitatively compared it to the previously used camera, an Intel RealSense D455.
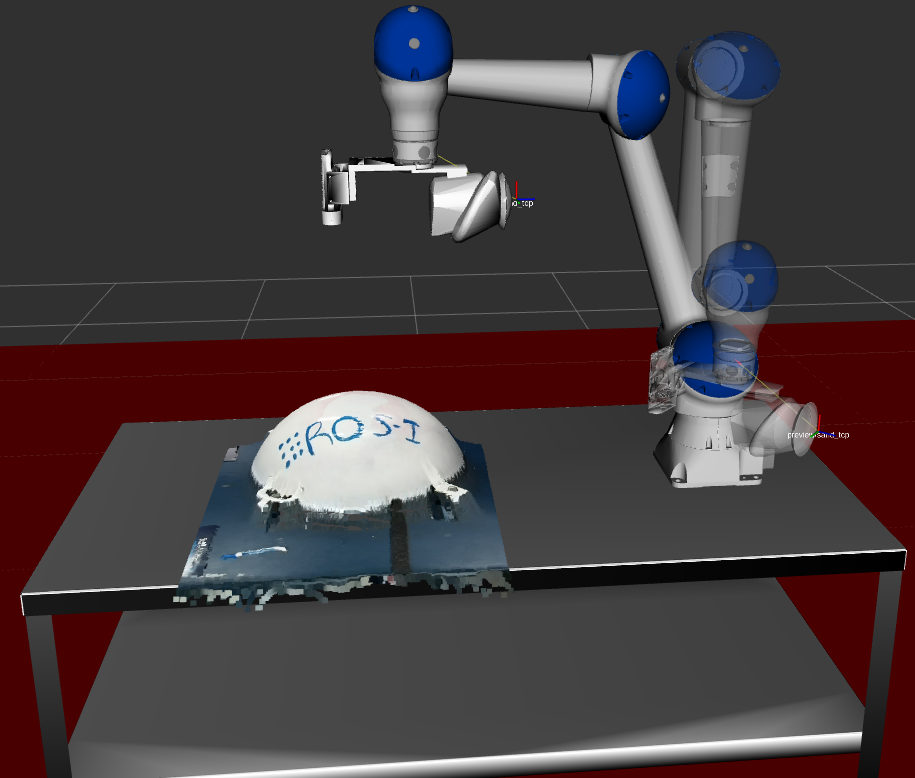
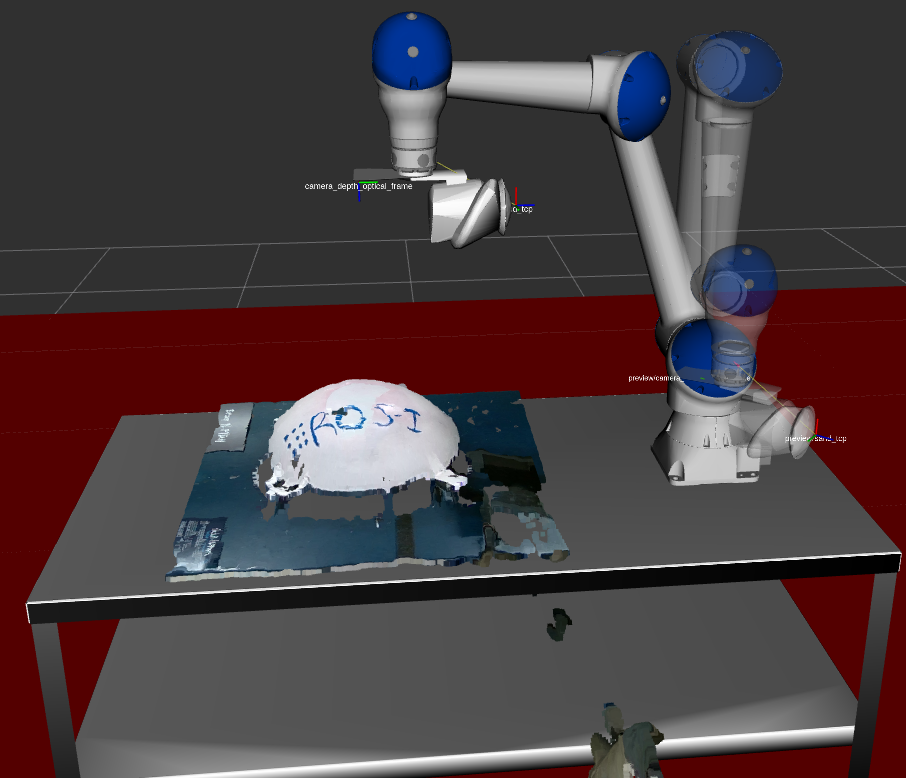
SwRI’s Scan-N-Plan demo utilizes RGB-D depth sensor to generate colored point clouds. The point clouds are utilized by Industrial Reconstruction to generate a colored mesh of the object in the environment. In the Scan-N-Plan demo, the scanned object is the underside of a white paint wok.
Scan-N-Plan demo with ORBBEC Femto Mega mounted on a Yaskawa HC10
Setup
Setting up the Femto Mega was relatively easy. There is github page for ORBBEC ROS2 drivers and documentation on how to install and use the driver, as well as download the OrbbecViewer. The datasheet was helpful for determining valid combinations of frame rate and resolution that the Femto Mega could be configured with the driver. The Femto Mega’s power over ethernet feature made long cable runs convenient and the publishing rate for the sensor data was very stable thanks to the onboard computing.
Qualitative Comparison
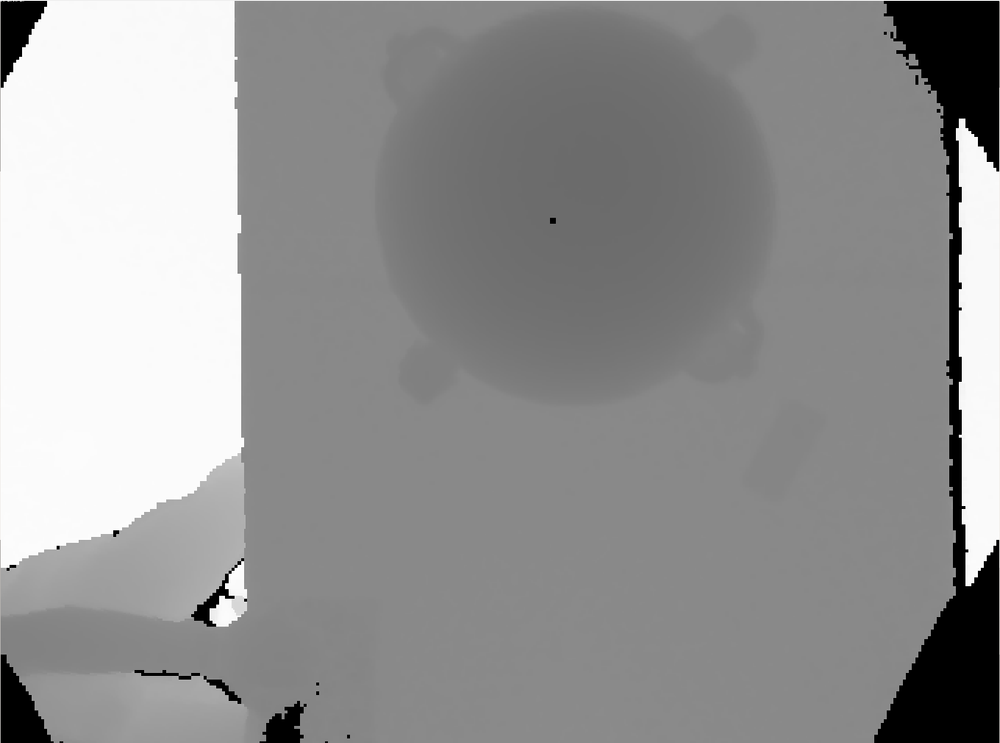
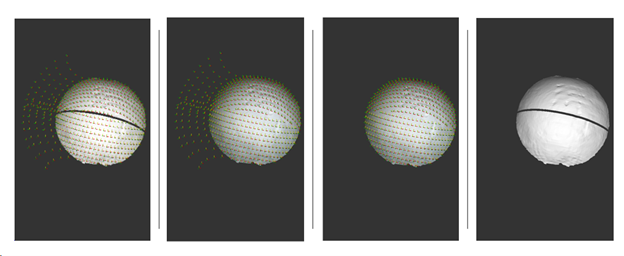
After calibrating each camera, we ran a scan using the D455 and then the Femto Mega. The Femto Mega had much less noise in the depth data and produced crisper edges. The Femto Mega also handled glare much better than the D455. In the reconstructed mesh, the Femto Mega had better surface quality than the D455. However, the D455 did result in a reconstructed mesh that had less blurring of the color data, particularly when looking at the written blue text. This is likely an artifact of how Industrial Reconstruction averages color data when reconstructing the mesh and may be further optimized in configuration settings.
fEMTO mEGA cOLOR iMAGE
fEMTO mega dEPTH fRAME
femto mega RECONSTRUCTED MESH
Colored Point cloud from femto mega
rEALSENSE d455 cOLOR iMAGE
rEALSENSE d455 dEPTH iMAGE
rEALSENSE D455 RECONSTRUCTED MESH
colored point cloud from realsense d455
We’d like to thank ORBBEC for giving us the opportunity to evaluate the Femto Mega and look forward to seeing more ORBBEC solutions utilized in industrial solutions.
This July, the consortium conducted a training at Wichita State University (WSU), more specifically National Institute for Aviation Research (NIAR), hosted by Spirit Aero Systems, from July 16th-18th. The attendees contained consortium members from Spirit Aero System, NIAR, Iowa State University, and Santa Clara University. This training was a great first exposure for those who haven’t touched ROS 2 before, while those more seasoned in ROS development got to dip their toes in motion planning with Tesseract. There were many moments where the attendees realized how they could apply these new skills to current and future projects.
This training was solely in ROS 2 Humble. On the first day the attendees were split into two groups: beginner ROS developers and advanced ROS developers. The beginner group focused on learning the fundamentals of ROS, covering workspaces, publisher/subscribers, services, and launch files. The advanced group learned about motion planning with Tesseract. On day 2 the groups came together to learn about creating URDF/XACROs to describe a robot, and using Moveit2 for motion planning in a simulated environment. The third and final day contained attendees working through the Perception Driven Manipulation Demo and moving a real-world robot.
All instructions for the ROS Industrial Training are available online. The template and solution code can be found on the ROS-Industrial github.
Special thanks to Spirit AeroSystems for enabling this training to be held at NIAR/WSU and thanks to NIAR for providing the Universal Robot for the laboratory exercises.
Next training will be in October, so stay tuned to the ROSindustrial.org events page for those details as they are finalized!
Recently, our consortium conducted a comprehensive ROS2 Basics training session at the Mitsubishi Electric Nagoya Works Factory Automation Centre in Japan, from May 14th to 17th . This training brought together our consortium members from IHI, Mitsubishi Electric, Pepperl+Fuchs, and Panasonic,as well as the training team from RIC-AP (Glenn Tan, Adriel Ho, Sheila Suppiah), all eager to delve into the topics of ROS2 Basics.
The sessions covered essential topics including the publisher/subscriber model, service client model, launch files, and parameter tuning in ROS2. A significant focus was also placed on comparing ROS1 and ROS2, highlighting the advancements and improvements in the latter.
To ensure a solid foundation, the course began with an introduction to the Linux operating system and command line interface, which is essential for ROS2 development. The engagement from our consortium members was great, with active participation and thoughtful questions that contributed to a vibrant learning environment. Their enthusiasm underscores a shared commitment to advancing robotics through ROS based technologies.
As part of their final assessment, students applied their newfound knowledge in a practical application focusing on the usage of a TurtleBot3 Burger. This hands-on approach allowed them to demonstrate their understanding of ROS2 concepts in a real-world context, further solidifying their learning.
The feedback from participants was generally positive, with many expressing their interest to delve deeper into more advanced ROS topics in the future. We also had the opportunity to further enrich the learning experience, as we concluded the training with an insightful factory tour of Mitsubishi Electric.
This training session wouldn't have been possible without the continuous support and dedication of our consortium members. Their unwavering interest in ROS2 is paving the way for future advancements in robotics, demonstrating the power of collaboration in driving innovation forward.
We look forward to our next run of trainings in Japan! Do drop a comment or contact us if you are interested to participate in subsequent runs. #goROS
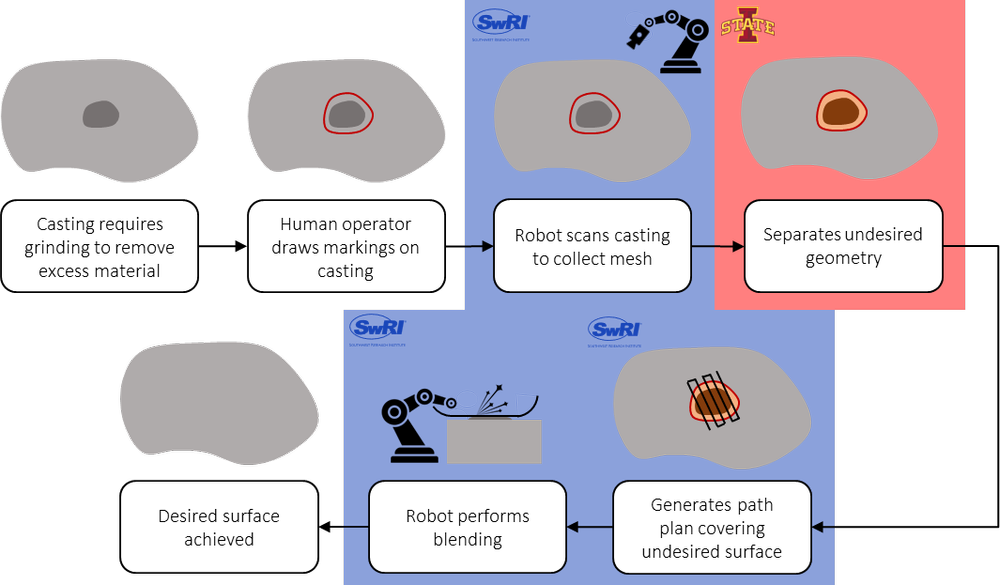
On March 7, 2024, the Robotic Blending Milestone 5 team convened in West Jefferson, Ohio, at Fisher Cast Steel to see a demonstration of a Scan-N-Plan framework, optimized for a foundry system, that has an operational goal of grinding riser and gate surface anomalies to finished surface tolerances. The idea is to provide a system that is operator-driven and requires no interaction with the traditional robotic teach pendant. Through the use of intuitive user interfaces, the system should be able to work from simple operator cues to process parts to their desired finish state.
Workflow including Isu developed capability
Launched in March 2023, the program was built around a team that included sponsor Steel Founders’ Society of America (SFSA), Iowa State University (ISU), Yaskawa Motoman, PushCorp and Southwest Research Institute (SwRI). The program would leverage legacy ROS-Industrial Scan-N-Plan developments over the course of prior Focused Technical Projects (FTP) developed via the ROS-Industrial Consortium, as well as university developed capabilities at ISU, funded previously by SFSA. The combined capability may be seen in the below graphic.
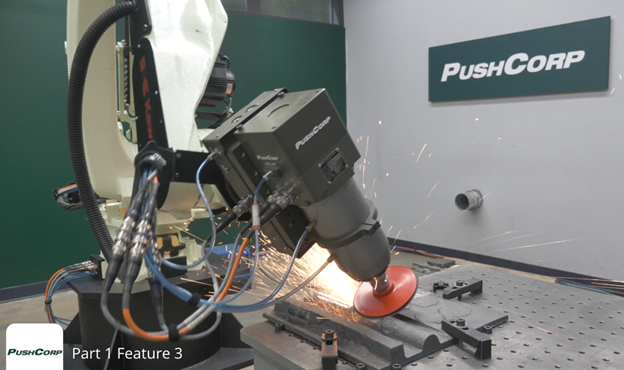
The program held workshops and integration events at multiple team member sites. The first was a process development workshop hosted by PushCorp in their process development lab in Garland, Texas. Fisher Cast Steel provided samples for each team to utilize for testing and PushCorp provided guidance on how best to set up their spindle and active compliance device.
From there a starting system, with minimal Scan-N-Plan framework was instantiated in the lab at SwRI. This was largely based on the Scan-N-Plan Workshop which has been the basis for some of the recent trainings relative to industrial reconstruction and motion planning pipeline tuning.
Process development at pushcorp
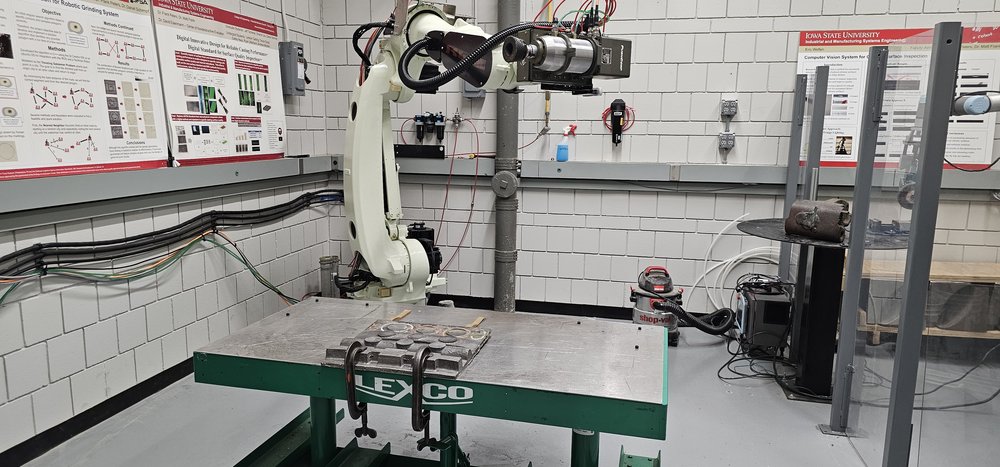
From this point after a virtual demonstration in the SwRI lab, work got going in the Iowa State lab. ISU had installed a robust Kawasaki industrial robot with a similar but different PushCorp active compliance/spindle combination. One of the goals of this program was to create the same software implementations at each site on their specific configurations. This would enable ISU to develop add-on capabilities and test them in their lab and then update the main application to enable incorporation into the end user foundry site for evaluation and use. The software framework for the program and the modules to be updated and contributed by ISU are pictured below.
ISU hosted an integration event and the team worked together to assist ISU in updating their prior work from ROS Kinetic to ROS 2 Humble. Also, there were numerous working sessions to get a reliable ROS 2 driver and on robot interface for the PushCorp hardware working on their system. By the time the demonstration came around at ISU they had a working Scan-N-Plan system and had gotten tool path planning, and new concepts for approaches for grinding stone media working. This would end up being the prime path moving forward relative to the target castings for the program.
Though we did not get all the ISU capability incorporated, the team continued to work on the ISU segmentation approach and the program at ISU continues to work and test a more recent version. The participation of the students highlighted the opportunity for collaboration of grad school programs with more seasoned programmers to establish the foundational tools needed to enable students to come up to speed on complex ROS-based systems and how to sustain the talent pipeline.
Finally, the Yaskawa Motoman team completed their build and integration activities. The team came together quickly at Fisher Cast Steel to get the system ready for ROS-based capability deployment. Safety issues were resolved and cable management and PushCorp equipment integration was further optimized. Once the system was ready, the SwRI team deployed to the industrial PC via developed Docker images the full application, executed camera calibration and started initial testing.
By the mid-point of the second week the system was regularly grinding castings. It became evident that process optimization and development would be required. Due to the human-drawn boundary segmentation not being ready, the user selects a region of interest to do the grinding on the UI by simply circling it on the reconstruction in the view. The industrial reconstruction provides nice contrast and human markings show up clearly to assist in the process.
The full team convened for the demonstration on March 7, 2024. A number of features were processed, and the system demonstrated, even with region selection from the GUI to efficiently process only within the region of interest. There have been several areas for improvement identified, but the team felt a lot was learned and the system can deliver value. Fisher Cast Steel has since done a number of process enhancements and continues to improve system performance while also training operators to run the system independently. A number of enhancements to the open source Scan-N-Plan_workshop have been pushed and a blog post details those improvements in detail. A highlight video of the program is slated for later release.
Thanks to the full team for their work on realizing this capability at Fisher Cast Steel. This program highlights the value of bringing university partners together with robotic system deployers and solution providers along with sound software practices to realize compelling capability and provide pathways for funded university research to get more efficiently into operational environments. Thanks to the program sponsor Steel Founders’ Society of America for being the champion for this program and thanks to Fisher Cast Steel for their continued enthusiasm and feedback to continue to improve the delivered system which will further benefit others down the road.
Disclaimer: The publication of this material does not constitute approval by the government of the findings or conclusion herein. Wide distribution or announcement of this material shall not be made without specific approval by the sponsoring government activity.
Acknowledgement: This research is sponsored by the DLA-Troop Support, Philadelphia, PA and the Defense Logistics Agency Information Operations, J68, Research & Development, Ft. Belvoir, VA.
A Focused Technical Project (FTP), championed by the Steel Founders’ Society of America (SFSA), sponsored by the DLA-Troop Support, Philadelphia, PA, and the Defense Logistics Agency Information Operations, J68, Research & Development, Ft. Belvoir, VA, within the ROS-Industrial Consortium (RIC), has recently completed the Focused Technical Project (FTP) Robotic Blending Milestone 5. The team included RIC team members consisting of Yaskawa America, PushCorp and Southwest Research Institute, along with SFSA member university, Iowa State University. This work culminated in a deployed system at a SFSA member foundry site.
The project built on the prior Robotic Blending Milestone 4, which demonstrated high-mix material surface finishing and edge processing of arbitrarily shaped and contouring parts, largely targeting piece-parts to be welded. This work sought to extend that work, adding new features and incorporating additional SFSA funded work to realize human in the loop high-mix casting finishing for foundry operations.
During the development process, we have contributed the following improvements to the foundational Scan-N-Plan framework that served as a starting point for the FTP. This framework is maintained as a workshop repository within the RIC GitHub repository and is used in whole or in parts for developer instruction in ROS 2 for industrial robotics.
Scan-N-Plan Updates
ROS 2 Control:
We have added ros2_control code to the Scan-N-Plan example implementations to preview the robot’s motion during a simulated motion execution.
Constant TCP Velocity Time Parameterization:
We have added a time parameterization algorithm for maintaining constant TCP speed during motion planning. The approach works by first calculating forward kinematics at each trajectory waypoint to get the pose of the TCP. Then, we create a line path between adjacent TCP poses and parameterize the line with a trapezoidal velocity profile. The joint velocity and acceleration at each waypoint are computed given the TCP Cartesian velocity and acceleration. These obtained velocities and accelerations are then validated to be within the limits of the robot.
Docker Images:
To make the deployment and development of Scan-N-Plan more efficient and standardized, we have created Docker images for ROS 2 Foxy, Humble, and Rolling that can be found here.
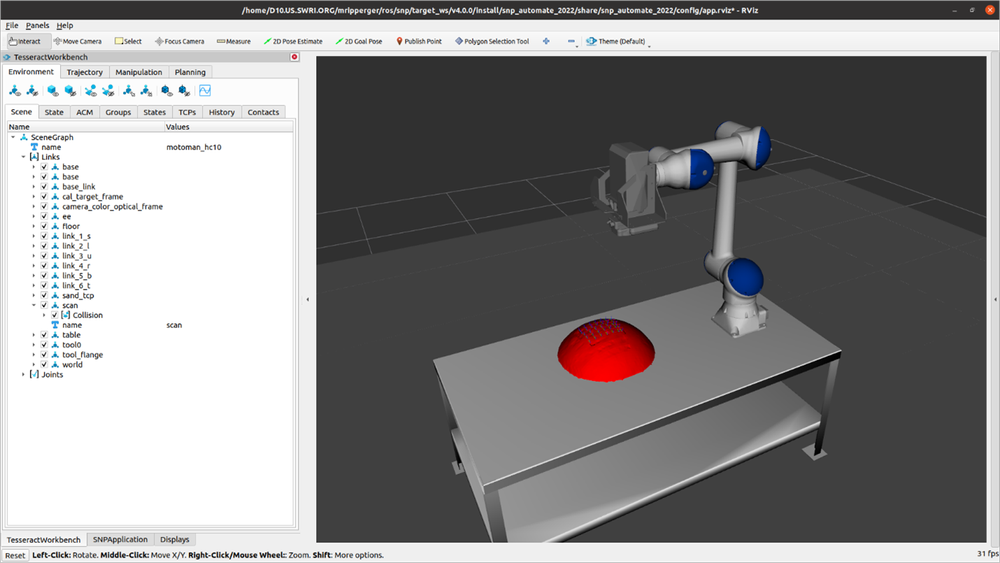
Selectable Representation for Collision Object:
In addition to the default behavior of converting the scan mesh into a convex hull, the collision object can now be represented as a detailed mesh or as an octree.
Default behavior: Converts the scan mesh into a convex hull. This generally results in the fastest motion plans, especially with TrajOpt, but can be too conservative and may cause motion planning failures if the scan object is not actually convex or nearly convex.
Convex Hull Representation of Collision Object
Mesh: Represents the collision object as the exact “detailed” mesh represented by the mesh file. With the contact test type CLOSEST for TrajOpt, this representation results in a somewhat slower planning time than convex_mesh, but not significantly longer.
Mesh Representation of Collision Object
Octree: Represents the collision object as an octree comprised of spheres with a diameter specified by the octree_resolution parameter. With the contact test type CLOSEST for TrajOpt, this representation results in slightly faster planning times than mesh but slower than convex_mesh.
Octree Representation of Collision Object
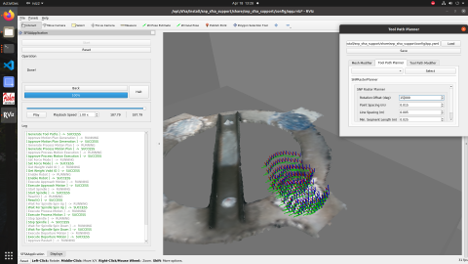
Simplified Raster Planner
Simplified Raster Planner Widget
The parameters exposed in the raster planner GUI widget were modified to only show commonly tuned parameters during raster planning such as rotation offset (degrees), point spacing, line spacing, minimum segment length. This declutters the raster planner to improve usability.
Python Scanning and Execution Nodes
For ease of development and debugging during deployment efforts, we have converted the mesh reconstruction and motion execution simulator nodes from C++ to Python.
Service for Generating Scan Motion Plans
A separate service for generating scan motion plans has been made as an intermediate step to support creating dynamic scan trajectories in the future. This service will be called to create scan trajectory patterns that originate from a specified starting location.
Behavior Tree and Reactive GUI
The custom application back-end logic has been replaced with a behavior tree to improve workflow modularity and customizability. The behavior tree can change the GUI appearance based on the current behavior executed. Widgets are exposed and hidden during the workflow to guide the user’s focus to actions and settings relevant to the process at hand. A progress bar and preview motion bar have been made more accessible to inform the user where they are in the process.
Noether Updates
Tool path and Mesh Visualization Tool
Mesh/Tool path Viewer Widget
When developing and debugging tool path and mesh modifiers, it is helpful to visualize the original tool path, the modified tool path, the original mesh, and the modified mesh. Previously, there was no way to view the unmodified sub-mesh after applying a mesh modifier.
We have added a widget in the Noether application to toggle the view of the mesh and tool path VTK objects. We replaced the concatenated mesh viewer using a vtkAssembly and using vtkSmartPointers instead of using raw pointers for internal objects.
From Left to Right: Modified Tool path and Modified Mesh, Modified Tool path and Original Mesh, Original Tool path and Original Mesh, Tool path Hidden and Modified Mesh
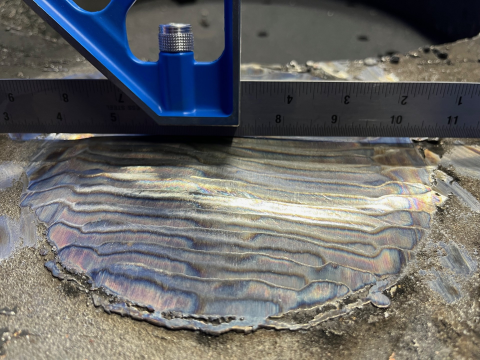
Approach and Departure Tool Paths
To better stay within selected regions during processing, we added linear approach and departure tool paths (see below for the linear approach tool path). A modified version of these tool paths (circular approach/departure) creates an approach/departure curve of specified radius.
Linear approach tool path modifier
Plane Projection Mesh Modifier
We added a mesh modifier that fits a plane to the input mesh using random sample consensus and projects the inlier points onto the plane. This modifier prevents tool paths from being generated on an unintended inner or outer surface near the edge of a complex part, where the desired processing surface should be flat.
We hope developers and those interested in experimenting with ROS 2 for their industrial robotics application development have found this resource helpful. If you have questions, comments, or have observed an issue, please do not hesitate to either engage with the ROS-Industrial community or leave an issue over at the GitHub repository.
Thanks to Michael Ripperger, ROS-I Consortium Americas Tech Lead, SwRI Sr. Research Engineer, for his contributions to the Scan-N-Plan Workshop and the FTP program and this blog post.
When translating a robot trajectory from a motion plan in a ROS system to an actual executed motion, there is an inherent loss of precision. In general, trajectories are sent to a controller that adheres to the exact position and timing constraints to the best of its ability, but compromises must be made to execute the trajectory. Additionally, robots cannot achieve infinite precision in positional accuracy because the kinematics of the system cannot be known with infinite precision. We have participated in work to maximize position and velocity accuracy, but not every process requires this level of precision. The process planning component should match the level of precision required by the application, but, traditionally, motion planners work assuming infinite precision. That is why we have now introduced tolerance into our motion planning pipeline when using Cartesian waypoints in TrajOpt.
TrajOpt is an optimization-based motion planner that uses a seed trajectory along with costs and constraints to refine towards a better trajectory. This process typically involves avoiding collisions and smoothing the motion. Previously, whenever we specified a Cartesian waypoint, the tool frame needed to adhere to the desired waypoint exactly. The total error across all six degrees of freedom (6DOF) could deviate by 1e-4 meters/radians, or it would be considered a constraint violation. In applications where we allowed free rotation or motion about an axis, the coefficient associated with that constraint could be set to zero, but users were not able to set bounds on the motion. For example, a common ROS-I application would allow free rotation about the Z-axis, so we would set the last coefficient in our waypoint coefficient vector to zero. An example of this process can be seen in the Scan N Plan Workshop.
Both the extremely high precision requirements and all-or-nothing approach to 6DOF Cartesian freedom of motion do not fit most applications. Additionally, these tight constraints can often cause unnecessary motion planning failures when a small freedom of motion would enable success. With the new tolerance parameters available in TrajOpt, we can more closely match the requirements of the system while reducing the number of motion planning failures. Now available in the trajopt_default_plan_profile are various settings to tailor the various waypoint requirements to the system’s needs.
Below are two example gifs. The first shows a failed plan when no tolerance was allowed (except for free rotation about the z-axis), and the second example illustrates a successful plan when tolerance was enabled: 15 mm in X and Y, 1.5 mm in Z, and 0.01 radians in rotation around X and Y (again, free rotation about Z was allowed). Visually, these two motions look almost identical, and infinite precision would not be required for this buffing process. Using tolerance in this application will enable the robot systems to align with the process requirements and improve overall success at incorporating robotics into various processes.
failed plan when no tolerance was allowed (except for free rotation about the z-axis)
successful plan when tolerance was enabled: 15 mm in X and Y, 1.5 mm in Z, and 0.01 radians in rotation around X and Y (again, free rotation about Z was allowed)
The ROS-Industrial Consortium Asia Pacific Summit 2023 was held on the 29-30 November 2023. The event marked a milestone in ROS journey in Asia Pacific where we have seen the growth from the time it started in 2016 to where it is today.
Throughout the 2-day event, ROS-Industrial brought together experts and industry leaders to discuss topics that have shaped and will continue to shape the future of robotics. The Annual Summit, themed “The Everyday Robot”, signifies how robots will be an integral part of our daily lives, at work, at play and at social life. The presentations and demonstrations provided a glimpse of how robotics applications have unknowingly integrated into various aspects of our lives, from industry, service, education, among others.
The event also witnessed the signing of two MOUs. Firstly, an MOU with Southwest Research Institute (SwRI) was signed to reinforce our shared commitment to collaborate as part of the ROS-Industrial global consortia.
MOU Signing with Southwest Research Institute
Secondly, an MOU was signed between ARTC and seven esteemed IHLs in Singapore, namely Nanyang Technological University Singapore, National University of Singapore, Ngee Ann Polytechnic, Republic Polytechnic, Singapore Institute of Technology, Singapore Polytechnic and Singapore University of Technology and Design. This collaboration aims to harmonize the curriculum for ROS-based courses to respond to industry demand, nurturing talents for the future workforce.
MOU Signing with IHLs
Dr. Ettikan Kandasamy Karuppiah, Chief Technologist of Enterprise Business at the Asia Pacific South Region of NVIDIA, took the stage to deliver his keynote speech on "The Next Wave of Robotics and Edge AI." He discussed how NVIDIA ISAAC open platform leverages cutting-edge GPU technology to make robots more capable of handling complex tasks in dynamic environments, enabling them to operate autonomously and efficiently in a wide range of applications. Dr Ettikan also touches on the exciting world of GenAI and various use cases where GenAI can be leveraged on.
Dr. Ettikan Kandasamy Karuppiah, Chief Technologist of Enterprise Business at the Asia Pacific South Region of NVIDIA
The three ROS-Industrial consortia also provided an update relating to the latest ROS2 developments and community outreach efforts within each of the regions.
Maria Vergo, Consortium Manager for ROS-Industrial Consortium Asia Pacific shared about the ongoing effort within Singapore to extend the use of Robotics Middleware Framework (RMF) to applications outside of healthcare, such as manufacturing and logistics.
Maria Vergo, Consortium Manager for ROS-Industrial Consortium Asia Pacific
Michael Ripperger, Technical Lead from ROS-Industrial Consortium Americas shared their work in robotics and shared ROS 10 years journey. ROS-Industrial Consortium Americas also shared about the Focus Technical Project (FTP) that was done in collaboration with their members on robotic blending with reconfigurable workflow and characterization-based path planning for quality assurance. Furthermore, Michael shared about the growth of ROS 2 driver support from leading robotics makers, such as Yaskawa, Kawasaki, ABB and UR. He also shared about SWORD, a platform that utilizes ROS-I tools in CAD-based environment among many other initiatives that ROS-Industrial Consortium Americas are pursuing.
Michael Ripperger, Technical Lead from ROS-Industrial Consortium Americas
Christoph Hellman Santos, Consortium Manager of ROS-Industrial Consortium Europe shared information about their software engineering and system integration, as well as their ongoing efforts in Europe. He also covered the different state funded research programs and projects throughout the years.
Christoph Hellman Santos, Consortium Manager of ROS-Industrial Consortium Europe
The afternoon session continued with engaging presentations by industry leaders.
Luca Della Vedova, Software Engineering Manager at Intrinsic, delved into "Unlocking the Potential of Robotics Through Automated Negotiation.” He introduced Open-RMF, an open-source framework for peer-to-peer negotiation to overcome deadlock issues in heterogeneous fleets of mobile robots, as well as discussed, the need for mobile robots to cooperate and dynamically share space in unstructured environments.
Luca Della Vedova, Software Engineering Manager at Intrinsic
Swaminathan Vangal Ramamurthy, General Manager at OMRON Automation Centre, shared insights into "Happy Factory - Where Men and Machines Operate in Harmony." In his presentation, he discusses the evolving relationship between humans and machines, highlighting the shift from collaboration to harmony in the journey towards an Autonomous Society.
Swaminathan Vangal Ramamurthy, General Manager at OMRON Automation Centre
Dr. Zhang Jingbing, R&D Director for Smart Robotics Automation (SRA) at ARTC, rounded off the series with a presentation on "RMF 2.0 – Enabling Large Scale Implementation of RMF for Cross-Sectorial Applications." In his presentation, he dived into the NRPO-funded program, uncovering the advancements in RMF2.0 technologies designed to overcome challenges in deploying mobile robots, as well as the R&D efforts in proliferating the use of RMF for manufacturing and logistics applications.
Dr. Zhang Jingbing, R&D Director for Smart Robotics Automation (SRA) at ARTC
Day 1 concluded with rotational workshops led by NVIDIA and ARTC where Dr. Ettikan of NVIDIA brought a topic on “The Future of 3D Collaboration with NVIDIA Omniverse and ISAAC Sim.” In this workshop, participants were treated to an immersive experience in leveraging NVIDIA ISAAC’s revolutionary capabilities and gained insights into utilizing Omniverse for scalable robotics simulation application development and synthetic data generation.
The second session was led by Dr Zhang Jingbing on "RMF – Market Readiness and Technology Requirements in Manufacturing, Logistic, and Facility Management”. During this workshop, facilitators shared about the existing effort to adapt RMF for cross-sectorial applications and prompted questions to guide the audience to share their vision of the future of RMF in these spaces.
The second day of the ROS-Industrial Consortium Asia Pacific Summit 2023 continued with another series of presentations and masterclasses.
Bobbie Couhbor, Senior Solutions Architect – Digital Innovation and Emerging Technologies at Amazon Web Services, started the day off with his keynote presentation titled “From Development to Production: Accelerating Robotic Development with Cloud Computing.” Participants gained insights on how several robotic vendors and consumers have used cloud computing to accelerate the development of their robotic capabilities and get their products to market rapidly without compromising on quality.
Bobbie Couhbor, Senior Solutions Architect – Digital Innovation and Emerging Technologies at Amazon Web Services
Next, we had Michael Sayre, Chief Executive Officer at KABAM Robotics, who shared insights on “Robots Among Us: Transforming Public Spaces and Resolving the Labor Availability Crisis”. He explored the transformative impact of technological advancements on revolutionizing facilities management and public safety globally, leading to enhanced efficiency and productivity through the deployment of Kabam’s Robots.
Michael Sayre, Chief Executive Officer at KABAM Robotics
Daniel Nia, Chief Executive Officer at HOPE Technik, presented “Journey of HOPE’s Robotics”, where he covers the journey of the company’s robotics ventures, spanning UAVs, drones, AV, AMR, UGVs, mobile manipulators, robotic cells, and exoskeletons.
Daniel Nia, Chief Executive Officer at HOPE Technik
Zhi Kai Lim, Senior Field Application Engineer at Real-Time Innovations (RTI), delved into his presentation “DDS in Robotic Systems: Advancements in Technologies and Ecosystem Collaboration”. He covers the pivotal role of RTI's DDS technology in advancing distributed systems, emphasizing its significance in achieving real-time advanced data management, ensuring data continuity, and shaping the future of technology integration and interoperability.
Zhi Kai Lim, Senior Field Application Engineer at Real-Time Innovations (RTI)
After the lunch break, the afternoon sessions commenced with Reeve Chong, Co-Founder, CTO and Managing Director at Hand Plus Robotics (Malaysia Office), presenting on “Designing, Assembling, and Deploying Reliable Robotic Packing Solutions for Large Scale Operations”. He showcased the successful deployment of a 6-robot packing system enabled by leveraging ROS to its fullest potential, achieving efficiency, reliability, and significant manpower savings.
Reeve Chong, Co-Founder, CTO and Managing Director at Hand Plus Robotics (Malaysia Office
Lastly, Professor Mohan Rajesh Elara, Provost’s Chair Professor at SUTD, concluded the series of presentations sharing his perspectives in a presentation titled “The Rise of Reconfigurable Robots: SUTD Initiatives.” He explored the challenges and advancements in the development of reconfigurable robots, focusing on deployment use cases in the maintenance domain and fostering a local ecosystem of robotic startups that were mostly spined off from many local talents from SUTD.
Professor Mohan Rajesh Elara, Provost’s Chair Professor at SUTD
The remaining time in the afternoon comprised of a series of masterclasses specializing in different focus tracks led by various industry experts.
Santosh Balaji and Adriel Ho, from ROS-Industrial Consortium Asia Pacific, delved into the fundamentals of behavior trees and their applications in robotics in his masterclass titled “Introduction to Behavior Trees and its Applications in Robotics.” Participants gained a profound understanding of behavior tree fundamentals, acquired practical skills for real-world task modeling, and explored the application of behavior trees in navigation tasks. His masterclass also featured a special guest virtually – Davide Faconti, the maintainer of BehaviourTree.CPP.
Christoph Hellmann Santos, from ROS-Industrial Consortium Europe, guided participants through the creation of a robot arm in ROS 2 from the ground up in his masterclass titled “ROS 2 CANopen Unleashed: Creating a Robot Arm from the Ground Up.” Utilizing ros2_canopen, attendees learned and gained a short hands-on experience on the process of building a robot arm in ROS 2.
Michael Ripperger, from ROS-Industrial Consortium Americas, conducted a masterclass titled “Tuning Motion Planning Parameters for Manipulators.” This session explored the practical aspects of fine-tuning motion planning parameters, incorporating algorithms such as industrial motion, OMPL, Descartes, and TrajOpt.
Vinu Sivanantham, from SUTD, led a masterclass titled “Enabling Self-Reconfigurable Robots using ROS.” Participants had the unique opportunity to utilize the Smorphi robot, unlocking the potential of versatile solutions for complex tasks in dynamic environments.
There were also booths stationed during the summit that consisted of prominent industry members in Singapore, namely Hope Technik, Weston Robot, Flexiv, Augmentus, Pepperl+Fuchs, KABAM Robotics, and ROS-Industrial, offered hands-on experiences with state-of-the-art solutions.
We would like to extend our deepest gratitude to all participants who graced us with their presence, contributing to the vibrant discussions, engaging presentations throughout the 2-day event.
A special acknowledgment goes out to our partners, AutomationSG, JTC Corporation, National Robotics Programme (NRP), and Workforce Singapore (WSG), who have made this event possible.
We would also like to extend our sincere gratitude to our booth partners, Flexiv, Pepperl+Fuchs, Kabam Robotics, Hope Technik, Augmentus and Weston Robot.
We anticipate 2024’s edition of the annual summit, and look forward to more collaborations, and the continuous evolution of robotics, as well as the community’s contributions to open-sourced. See you in our next edition of the event!
The ROS-Industrial Consortium Americas hosted a fourth quarter end of year Community Meeting that highlighted recent develoments and upcoming events for 2024.
Matt Robinson led off the meeting with programmatic updates and some of the findings from the recent roadmap workshops and highlighted that a roadmap revisit at the ROS-Industrial open source project level would be coming for 2024. Furthermore, updates on training, with a proposed schedule was shared along with the announcment of the ROS-Industrial Consortium 2024 Annual Meeting.
The 2024 edition of the RICA Annual Meeting will take place March 27-28 and include demonstrations and lab tours. There is also the oppportunity to consider some hands on workshop time and surveying of the membership will take place early in 2024 to nail down specific events and Annual Meeting content. The event listing will continued to be updated as details are firmed up.
New feature enabling submesh visualization in noether
For the technical portion of the program Michael Ripperger shared recent workshops and technical updates to various ROS-Industrial tools and resources. The first noted was REACH hihgligthed by the recent ROSCon 2023 workshop that took place in New Orleans. There are now two working demos included in the workshop repository, which will eventually be moved to the ROS-Industrial GitHub organization. This workshop may be offered as a stand alone workshop or as part of an existing ROS-I training event.
Next, Michael shared a recent enhancement to noether, the tool path planning repository within ROS-Industrial. For some time, noether has supported region selection and application of tool paths within a selected region. However, it was not able to provide a visualization of that sub-mesh. Visualizations of sub-meshes has recently been merged and this enables both an improved visualization experience for an end user, but also the means to more thoroughly understand how an automated segmentation function is performing during the application development process. This is exactly the use case for the ROS-I Consortium Focused Technical Project Robotic Blending Milestone 5, where there is interest in applying tool paths in human drawn boundaries.
Tool path tolerancing to enable improve trajopt performance
Tyler Marr then dove into recent developments within Tesseract and in particular TrajOpt. The first update was the ability to use custom tasks in Tesseract motion planning pipelines. Tyler provided a couple examples in the presentation and provided a URL reference in how this is used in the Scan-N-Plan workshop.
From here Tyler covered the ability to apply Cartesian tolerance waypoints for Trajopt. Historically, Trajopt would simply attempt to find a solution for a proivded tool path or set of way points wihtout understanding what additional flexibility may be available. By enabling the application of tolerances in x,y,z, roll, pitch, and possibly free rotation around z, trajopt has greater liklihood of finding a solution. In the recording there are comparison screen casts of before and after leveraging this feature. It is anticipated this will enable a greater array of more complex tool path presentations to be solved via Trajopt. This is currently a pull request, but it is anticipated to be merged before the end of '23.
Overview of sword - ROS-I planning tools in a CAD environment
Michael wrapped up the technical session with an update on SWORD, the ROS-I planning tool that operates in a CAD environment. An alpha release is planned in early January 2024, with a website and the ability to experiment with a trial version. If you have interest in experimenting with SWORD, feel free to contact any of the ROS-I Americas team.
As always reach out if there are questions or if you are interested in contributing or being involved wiht the ROS-Industrial open source project or the Consortium. Have a great end of year and start to 2024 and as always thank you for your interest and support in open source for industry.
The ROS-Industrial Bootcamp 2023 recently concluded, marking another successful chapter in our ongoing commitment to nurturing the next generation of robotic innovators. This 4-day highly anticipated event, held from October 2nd to 5th, brought together 24 aspiring Roboticists from three Institutes of Higher Learning: Ngee Ann Polytechnic (NP), Singapore Polytechnic (SP), and Singapore University of Technology and Design (SUTD).
Since its inception in 2017, the ROS-Industrial Bootcamp has been a cornerstone of our mission to equip students with essential knowledge in Robot Operating System (ROS) before embarking on their final year of studies or internships. The 4-day intensive program is designed to bridge the gap between theory and practical application, ensuring that participants are well-prepared for the challenges that lie ahead.
The bootcamp commenced with a foundational session on the fundamental principles of ROS, expertly led by Vinu from SUTD. During this session, participants delved deep into the core concepts of ROS, gaining profound insights into its pivotal role within the realm of robotics.
On the second day, participants were introduced to the practical side of robotics. Collaborating with Weefa Robotics, a local startup specializing in educational robots, students had the unique opportunity to configure a robot, providing them with hands-on experience that is invaluable for their future endeavours.
The intensive 4-days program was packed with important ROS concepts. On day 1, students were provided with the basic knowledge of ROS. Manu, from SUTD provided a lecture on ROS
On the second day, the students were given the opportunity to configure a robot. This year, we engaged Weefa Robotics,a local startup specialising in education robot.
On the third day, the focus of the bootcamp shifted towards the exploration of advanced robotics applications that enable navigation for robots. Specifically, the day was centred around two crucial components: augmented reality and autonomous tracking. These in-depth sessions broadened the students' horizons while fostering an environment conducive to innovative thinking and problem-solving.
The highlight of the bootcamp on the final day was when students participated in a mini competition. Working in teams of two to three, they faced the challenge of guiding their robots through a maze in the fastest time. The competition brought together all the knowledge and skills acquired throughout the bootcamp, providing a platform for students to showcase their abilities.
We extend our warmest and most heartfelt congratulations to the exemplary champions who emerged victorious in the maze navigation challenge. Their remarkable achievements serve as a resounding testament to the unwavering dedication and extraordinary talent exhibited by our future robotic engineers.
At ROS-Industrial, we believe that events like the ROS-Industrial Bootcamp 2023 inspire young engineers to innovate and push the boundaries of robotics applications. As we look forward to the future, we remain committed to fostering the next generation of robotics pioneers who will undoubtedly shape the landscape of robotics and automation.
We would like to express our sincere appreciation to our esteemed trainers: Adriel, Shalman, Vinu (SUTD), Sheila, Fairuz, and our amazing interns - Yu Cheng, Gabriel, and Ryan. Your dedication and support have played a pivotal role in making this event a resounding success.
On September 21 ROS-I Consorium Americas hosted a community meeting where a number of topics were covered. The presentations have been made available and the recording may be found over at the ROS-I YouTube channel.
To kick things off I reviewed some Consortium initiatives. Most recently we have been addressing concerns around industrial_core. There have been comments on a ROS 2 support issue about porting of industrial_core. However, as pointed out on the GitHub repository we will not be porting industrial_core due to the desire to take advantange of advances in OEM provided external motion interfaces and new approaches in driver development such as ros2_control based drivers and the recent Yaskawa micro-ROS based driver.
The idea is that OEMs will see opportunity in engaging the ROS community by offering a driver they are comfortable supporting, therefore there are not issues relative to performance as OEM changes occur within their software stack. We look forward to following up with an updated industrial driver specification, and will keep the community engaged on progress on that front.
From there we covered a couple focused projects. You can catch all the details in the slides, but the Robotic Blending Milestone 5 Focused Technical Project was covered, as well as work and progress on SWORD.
The FTP has already resulted in numerous enhancements to scan_n_plan_workshop and will also realize improved capabilities in a few other supporting repos.
SWORD came about as manufacturing engineering stakeholders continued to request ease of use tools, that also enabled greater ties to the CAD environmetn. SWORD seeks to provide, via a plug-in to FreeCAD, a simple UI for end-users to set up work cells and do various types of motion planning and motion tuning operations. We look forward to showing more, beyond what is in this deck or this deck, of SWORD in the coming months.
For the guest speaker at the meeting we were excited to have Pablo Garrido Sanchez from eProsima on board to share the latest around micro-ROS and supporting advanced ROS 2 deployments on microcontrollers and similar resource constrained devices. Check out his deck also included here and on the event page, as well as his full talk on the ROS-I YouTube channel.
Thanks to all those that attended and we look forward to hosting upcoming Developer Meetings and the Workshop at ROSCon. As always check out ros-i.org/events for the latest in chances to learn and collaborate with others excited about open source for industry.
On May 25 in Detroit the ROS-Industrial Consortium Americas (RICA) held the 10th iteration of the annual meeting, where Consortium members can get together, learn from each other, assess the state of the ROS-Industrial open-source project and provide feedback and engage in guided discussions, all with the intent of providing a two way interaction to understand the state and happenings relative to ROS-I and to provide their needs and areas for improvement.
A few wrinkles were included in this year’s edition. First, during the opening talk around the state of the Americas Consortium Shaun Edwards offered insights and thoughts relative to the beginnings and what we should be possibly considering looking forward.
The morning program continued with regional updates, including recent work by ROS-I Consortium EU seeking to instantiate a ROS 2 reference work cell, and highlighted recent contributions and plans to realize their vision. ROS-I Consortium AP shared their recent efforts to realize system level capabilities stemming from their extensive work around the interoperability framework Open RMF.
Kat Scott of Intrinsic shared the latest features included in the recent Iron Irwini ROS 2 release which happened only days before. A number of features highlighted include inclusion of REP-2012 Service Introspection, which is sort of a ‘ROS debug mode’ for understanding service calls and their results. Also, pre and post parameter callback, to enable parameter lists on the fly, and external logger configuration to enable only one node in verbose mode if you choose, as well as improvements in launch, rclcpp, rcl, and CLI.
Dave Coleman of PickNik shared the latest developments around MoveIt Studio and their recent efforts in support of SpaceROS with some key highlights that drive relevancy for industry, such as code quality and reliability.
To wrap up the morning session David Poweleit of the Steel Founders’ Society of America (SFSA) shared their recent initiative to sponsor a collaboration project across a diverse team including Yaskawa Motoman, PushCorp, Iowa State University, Southwest Research Institute, EWI, and ARIS Technology. The intent is to build on prior Scan-N-Plan collaborative efforts, referred to as Robotic Blending which had been through 4 prior milestones, to realize a prototype job shop system to enable high mix low-lot foundry finishing. This served as a lead-in for the broader goal and mission around the SFSA and their members relative to enabling funded research to get into foundries more efficiently.
From here Keynote speaker Shane Whitaker, Applications Engineer at Lockheed Martin, shared how and why their team has chosen to leverage ROS and open source in their pursuit of advanced capability. The value proposition for the nature of the operations is around the realization of operational agility for their environments and the nature of the tasks they need to get done to produce the products in their factories. The number of processes of interest and developed, leveraging open source, were broad, and it was inspiring to understand that these developments are making a difference on the floors of Lockheed Martin factories.
Shane Whitaker from Lockheed Martin shares their Agile Automation journey and how ROS has made an impact for their operations
New for this iteration of the annual meeting was offering externally guided workshop time. Per past annual meetings we spend time discussing what is within ROS-I, seek to drive conversations to understand what those that are looking for capability need, both with regards to capabilities and resources to enable their success. A lot of feedback was gathered, and some really interesting insights were shared. A more formal report on feedback will be coming soon.
The additional workshops were led by David Poweleit of SFSA and Adam Norton of the Nerve Center at University of Massachusetts Lowell. David led a dialog, largely centered around the SFSA members that were in attendance, but also solicited great responses from other general industry members that have similar challenges as the foundry industry. Technology developers also engaged, asking about requirements, the desired types of capabilities, and means to operate.
Adam Norton along with colleague Berk Calli of Worcester Polytechnic University led a conversation around their National Science Foundation funded work on Pathways to Enable Open-Source Ecosystems starting with Open-Source Robotic Manipulation and Benchmarking: Current Gaps and Future Solutions. The scope was broad as it covered open-source assets, such as software, designs of physical robotic components and systems, datasets that support AI/ML, and instructional elements that enable benchmarking of various components. The goal is to drive a discussion on what is missing and how can we better assess and continue to grow leverageable open-source assets and compare them to sustain a future where open-source plays a key role in innovative development. You can learn more about this initiative via this handout and the presentation shared at the workshop.
Diving into the afternoon Bharath Rao, Senior Research Lead at Spirit AeroSystems, covered their vision for sustained deployment of advanced systems and solutions for entire value stream monitor and control across many assets, some human driven, others if not autonomous a future where they are. Bharath laid out a compelling vision for how a manufacturing entity may leverage open-source to realize a vision over incremental capability introduction that grows with testing, validation and improvement.
Dr. Eugen Solowjow, Head of Research at Siemens Berkeley, shared the recent work within Siemens to enable AI for robotics and how they are delivering products that enable AI solutions to run on and interoperate with traditional industrial hardware, such as PLCs.
The latter part of the afternoon included the latest in improved motion profile accuracy at high speeds for complex 3D curves presented by Dr. John Wen of Rensselaer Polytechnic Institute. This work has been really exciting for those that want to leverage autonomous motion planning but struggle with how the actual manipulator turns the sent trajectories into real motion. The two-step process includes a redundancy resolution algorithm that filters and adjusts the input target tool path and then leverages a reinforcement learning approach to further tune the manipulator that may be done on hardware via a handful of dry runs or in the OEM simulation engine if it accurately represents the physics. These tools have been provided in the RPI open-source repositories and have been developed in the course of an ARM Institute project.
Wrapping up the day, Joseph Giampappa of the ARM Institute provided an update on the latest initiatives within the ARM Institute, and the day concluded with Ted Miller of Yaskawa Motoman announcing the official release of MotoROS2. This is the latest in ROS 2 support in the industrial manipulator domain and the first where the ROS 2 node actually runs on the robot controller.
Looking back, it was a great week in Detroit and a great day spent with all the organizations, collaborators and individual developers seeking to make open-source for industry a leverageable resource for innovation in industrial settings. The continued development and latest work taking place both in the open-source and within the organizations that are leveraging open-source and making contributions, are building on the legacy and enabling new players to deliver novel new solutions. This brick-by-brick approach enables broader opportunities for innovation while enabling educational resources for future roboticists.
ROS-I Consortium americas Annual Meeting attendees gather for a group shot to wrap up the event
Thanks to all those that have made ROS-Industrial a successful collaboration, and thanks to all of those that have supported the ROS-Industrial Consortium around the globe. Through collaboration and a framework that enables continuous progress, open-source for industry can continue to make an impact for the advanced manufacturing needs of tomorrow.
All the talks described above are in a playlist at the ROS-Industrial YouTube channel. If you are interested in getting involved in the ROS-Industrial open-source project, you can learn more here. If you are interested in the benefits of the ROS-Industrial Consortium, you can check out the membership details here and feel free to reach out!
This July, Southwest Research Institute (SwRI) hosted the most recent ROS Industrial training workshop. A large group came in from around the Americas region to learn a mix of ROS 2 fundamentals and advanced topics, as well as explore the city of San Antonio.
ROS-I trainers and students gathered to enjoy dinner out in San Antonio
To start the workshop, beginner students worked through the basics of ROS 2, while those already familiar with ROS were walked through our freshly updated exercise on performing motion planning with Tesseract. All students then came together to learn about setting up their robot URDF, do motion planning with MoveIt, and process pointclouds using PCL. Notably, these students were the first to experience the ROS-I training fully in ROS 2 Humble. No more spending time during training wrapping your mind around ROSbouncing between ROS 1 and ROS 2 1 just to get MoveIt up and running.
The students were also given a tour of Southwest Research Institute’s robotics facilities, where they got to see what they were learning in action. SwRI demonstrated a scan-n-plan application that utilized the ideas of motion planning and perception taught during training.
Students observing the demonstration of a scan-n-plan application on a physical robot
All training materials can be found on the ROS Industrial Training wiki. From there, you can download preconfigured VMs and jump right into exercises, or, if you want to stay on your own machine, our GitHub repository hosts a script that will install everything you need automatically.
If you are interested in hostingattending or organizing a future training, please reach out to a team member! We are always excited to bring our knowledge and expertise to you.
Industrial robotics has changed dramatically from a decade ago, when a small group of researchers held the first annual meeting of the ROS-Industrial Consortium. Back then, much of the robotics research happening in university and corporate labs would languish in papers because it was difficult to replicate custom implementations using proprietary software.
Things started to change when the Robot Operating System (ROS) – an open-source software platform founded in 2007 by Willow Garage, the Stanford AI Laboratory, and Open Robotics – started reappearing in research papers. ROS helped open the door to R&D scalability across industry and academia, enabling a means to abstract robotics hardware, while also bringing a modularity and notion of abstraction and reproducibility to the robotic research space.
ROS caught the attention of a group of leading robotics companies and research institutions, including Yaskawa Motoman and Southwest Research Institute (SwRI). They teamed up with Willow Garage and founded the ROS-Industrial Consortium (ROS-I), which held its first annual meeting in 2013. On May 25 of 2023, the ROS-Industrial Consortium celebrates its 10th Anniversary.
In 2013, when ROS-Industrial held its first meeting at SwRI in San Antonio, there were 14 member organizations. Today, membership has expanded to over 85 organizations representing a broad range of industries and academic institutions.
The First ROS-I Consortium Gathering March 2013
How ROS-I Harnessed the Potential of Open-Source for Industry
The ROS-Industrial founding organizations saw the potential of open-source robotics technologies to revolutionize the manufacturing industry, and they came together to create a platform that would enable the development and deployment of these technologies in a cost-effective and efficient manner. ROS-I sought to bring more advanced computer science tools and standard path planning/motion planning libraries that were not sole propriety of the robot manufacturer. This confluence enabled investigation of a new approach to industrial robotics and a chance to set a path towards new capability that was not either only in a research lab or only available via one robot manufacturer.
Shortly after the founding of ROS-I, that first commit by SwRI’s Shaun Edwards and Paul Hvass—with the support of SwRI’s Paul Evans and Clay Flannigan—launched the ROS-Industrial Consortium. It wasn’t long before Fraunhofer IPA in Germany and the Advanced Remanufacturing Technology Centre in Singapore launched collaborative ROS-Industrial Consortia for the European Union and Asia-Pacific regions. Their energy and ingenuity have made Consortium growth and management such a fruitful experience.
Since that time the Consortia, via collaboration and engagement with industry, have made significant progress towards the goal of accelerating the development and adoption of open-source robotics technologies for industrial applications. Some of the consortium's key accomplishments include:
Developing a comprehensive set of software tools and libraries that enable the use of ROS for industrial applications.
Creating a vibrant community of ROS users and developers in the industrial robotics space.
Conducting several successful Focused Technical Projects (FTPs) that have developed new capabilities for ROS-I.
Working with leading robotics companies and research institutions to promote the use of ROS for industrial applications.
Growing ROS-I by Improving Standardization & Expansion
Shaun and Paul have since benefitted since joining and leading Plus One Robotics while also continuing to be stewards and champions for open-source collaborative development.
Shaun provided his take on what he has seen from the start of the ROS-I Consortium and what it has enabled: “In the very beginning of ROS-I, we found ourselves defending the robustness and reliability of open-source software. Only time would demonstrate that ROS could be as robust and reliable as commercial software as it was adopted across industrial and commercial robotics. Those companies with existing robot software stacks were not able to wholesale switch to ROS. Instead, they created integrations with ROS, while mimicking features of ROS that users found compelling (e.g. rich visualizations, physics simulation, and advanced computer vision). End users with complex and dynamic robot processes found ROS was necessary in order to build advanced solution. One such example was the ROS-Industrial Scan-N-Plan project(s). Scan-N-Plan leads to deployments at end users and was later followed by several startups who productized similar technologies for welding (Path Robotics) and sanding (GreyMatter). In addition to those examples, many startups without existing software stacks, were free to start with ROS as the core of their product offering. Plus One Robotics, Fetch Robotics, Renu Robotics, and Amp Robotics are just of few of hundreds. These companies have gone on to solve valuable problems and become respectable robot companies.”
Though a lot of progress has been made, there is still a role for a consortium that fosters collaboration between the open-source community, industry, and academia. Recently it has become very clear that standardization of various interfaces, communication standards, and modeling is lacking, manifesting in numerous translation efforts and frustration when multiple protocols are required within one application. Numerous working groups are in progress to investigate these, and the ROS-I Consortium has played a role in providing input to drive an industry perspective.
Shaun took the time to add his take on what the Consortium can contribute moving forward: “The consortium speaks with a louder voice today than ever before. It should use this new standing to expand its footprint. There remain many challenges in robotics today that could be addressed by cooperative research in the vein of Scan-N-Plan and other consortium projects.”
Shaun added that, “Expansion beyond robotics should also be considered. There are more open standards and open software in industrial automation today than ever before. An advanced robot cell contains robots, PLCs, and HMIs, as well as links to the cloud for analytics and planning. All these aspects have a software component that already have or could have has open-source alternatives. Just as ROS is now firmly a part of industrial robotics, the ROS-Industrial Consortium could usher in the age of open source for the entire factory.”
The Next Decade: Building Community & Integrating AI
ROS-I is well-positioned to continue to accelerate the pace of advanced robotics for industry in the years to come. The consortium has a strong track record of success, and it has a vibrant community of users and developers who are committed to the advancement of open-source robotics technologies. In addition, ROS-I is working with leading robotics companies and research institutions to promote the use of ROS for industrial applications. ROS-Industrial seeks to enable efficient incorporation of Artificial Intelligence in its various forms, and supporting commercial entities that seek to streamline the ease of use for robotics and AI together.
The ROS-I Consortium will continue to work towards providing value not only to its members, but also to the open-source robotics community. This includes example applications, helping to make open-source robotics technologies more accessible and affordable, and it is enabling the development of new and innovative industrial capability that can improve productivity, safety, and quality.
We look forward to collaborating with the robotics community more broadly to enable more end-users to solve their complex challenges in an efficient way and provide the means to entrepreneurs to have bankable new tools for which to address the needs of their target market. At this, the 10-year anniversary of the Americas Consortium meeting where members gather to share the latest in open source for industry, we will seek pathways to continue this mission. The ROS-I Consortium has enjoyed providing the foundation and we look forward to continuing to enable the industrial robotics solutions for tomorrow.
For remote attendees live streaming of talks has been a tradition and was made available and recordings of the sessions will be available in the future.
Development in ROS used to only be able to be done in Linux, with Ubuntu being the only fully supported operating system. With ROS 2, more options have opened up to support ROS development. In this blog post, we’ll discuss how you can get ROS 2 up and running on the Windows.
Why use ROS 2 in Windows?
There are a number of reasons you may wish to pursue ROS development in Windows.
You or a client are limited in available operating systems
You want to utilize applications/libraries that are only supported in Windows
You are much more comfortable with Windows development over Linux development
Why not use ROS 2 in Windows?
While there are good reasons to use ROS in Windows, the reasons against it are substantial:
ROS 2 packages are still typically developed with Linux in mind, and often don’t build without
modification
ROS in Windows is generally less supported and complete than it is in Linux.
You will have more trouble finding solutions for any problems that come up
More unexpected issues are likely to pop up than in Linux
ROS behaviors are not entirely consistent between operating systems
RVIz launching in windows
What are my options?
The simplest option to using ROS 2 in Windows is to avoid using Windows as much as possible by using Windows Subsystem for Linux (WSL). WSL operates a Linux kernel on top of the already running Windows kernel, allowing it to execute programs meant for Linux while within Windows. This is much more lightweight than a full virtual machine and allows easy access to files located within your Windows system. Head here (https://learn.microsoft.com/en-us/windows/wsl/install) to get started with WSL.
>A second option is to use a fully pre-built package from the chocolatey package manager. This will streamline the installation process to a few copy-paste commands and greatly reduces the likelihood of errors occurring in the installation process (which can be non-trivial to debug). aka.ms/ros hosts a package for ROS 2 foxy, with instructions available here (https://ms-iot.github.io/ROSOnWindows/GettingStarted/SetupRos2.html)
A final option if you really need a version that is not installable as a full package via chocolatey is to follow the installation instructions for that distro from the ROS 2 docs (https://docs.ros.org/en/humble/Installation/Windows-Install-Binary.html). There are a large number of steps that are far more prone to error, and since Windows is not as well supported, these instructions are more likely to be out of date themselves.
Working with ROS in Windows:
If you choose to use WSL, then congratulations! You don’t have anything new to learn. You have access to a bash shell with all the usual ROS 2 commands you know and love. Simply start your WSL instance and you’re good to go.
If you are truly only using Windows, you will be working within a Powershell or Command Prompt window, which will work with their own commands for you to learn instead of bash. Make sure to call the appropriate setup.ps1 or setup.bat for the terminal you are using, and expect to modify the Cmake for any ROS projects that you are building from source. A few other considerations are listed here (https://docs.ros.org/en/foxy/The-ROS2-Project/Contributing/Windows-Tips-and-Tricks.html)
Conclusion
While it is recommended to stick with Linux for your ROS development, you have options to continue your applications in Windows. There are some extra limitations and difficulties, but once you get past the initial pains, the development process is largely the same.
The ROS-Industrial Consortium, championed by the Steel Founders’ Society of America (SFSA), has launched the Focused Technical Project (FTP) Robotic Blending Milestone 5. This builds on the prior
Robotic Blending Milestone 4, which demonstrated high-mix material surface finishing and edge processing of arbitrarily shaped and contouring parts, largely targeting piece-parts to be welded.
In this new milestone, launched in March, the key goal is to place a working system at an SFSA member foundry site, and enable that end-user to leverage the CAD free, entirely perception-driven system to remove unwanted surface features due to casting pour process and finish the total surface area for subsequent inspection and ship to the client.
To make this FTP a reality, a diverse team provided various forms of contribution to enable successful application development, core capability implementation, testing, and a pathway to replication for additional foundries. This team consists of champion SFSA, Southwest Research Institute (SwRI), Yaskawa America, PushCorp, Iowa State University (ISU), deployment foundry Fisher Cast Steel, and in-kind team members ARIS Technology and Edison Welding Institute.
As is the case in prior FTP efforts, there will be multiple integration events that enable cross-team collaboration and will leave functioning capability at partner sites. In this case with partner university ISU, which will integrate recently developed capability, host a collaborative integration event, while learning the blending framework. SFSA has a long history of working with ISU and a key milestone will be implementing into the Scan-N-Plan framework recently developed riser removal perception driven finishing that has been demonstrated in the ISU lab. The goals of this integration of the ISU capability are to leave a functioning Scan-N-Plan system in the ISU lab to enable them to implement and test capabilities developed with SFSA and enable more efficient transfer to end-user sites that may adopt the Robotic Blending capability in the future.
The project completes with an integration event at the SFSA member, Fisher Cast Steel, and demonstration of capability on production cast parts. The removal surface irregularities due to riser removal will be evaluated across the parts as well as overall surface finishing to support surface inspection processes where required. A summary of core repositories that were improved will be detailed and a highlight video and supporting documentation will be provided. In-kind partners will have the opportunity to support additional end-users to adopt the capability and make further refinements on top of the core developed capability.
The ROS-Industrial Consortium, in collaboration with SFSA and the development team look forward to furthering advanced robotics capability for industry and to provide a pathway for foundries to adopt intelligent automation for high mix casting environments.
Acknowledgement: This research is sponsored by the DLA-Troop Support, Philadelphia, PA and the Defense Logistics Agency Information Operations, J68, Research & Development, Ft. Belvoir, VA.
Disclaimer: The publication of this material does not constitute approval by the government of the findings or conclusion herein. Wide distribution or announcement of this material shall not be made without specific approval by the sponsoring government activity.
Earlier this year, I made a beginner’s course Build Mobile Robots with ROS2, that focuses on mobile robots. This blog post describes my experience and thought process when designing it.
Introduction
I used ROS for my Master’s Thesis (A 3D Mapping Payload for UAV Applications) in 2013. Then, I started working full-time with it around 2016 and never stopped. My main focus was always on applications using drones and mobile robots, so covering mobile robotics was a natural fit for the whole project series.
Why did I switch from calling it a course to calling it a project? Manning LiveProjects are not traditional online courses. Instead, the students get the materials they need to go through by themselves. Then they complete the assignments themselves, with occasional help from extra resources, mentors or fellow students.
Project Series
In the project series, you will be joining RoboPrototypes, a company focusing on developing custom robotics solutions for their customers. Once you complete your first project, you are on board with the company, and you have to deliver Dribot, a mobile robot prototype that will carry drinks in the customer’s food courts in the mall near you.
A simplified 3D render of a Dribot differential-drive robot
Your quirky boss Michael (any potential resemblance to characters from a certain TV show about people working in an office is purely coincidental), who at one point is careless enough to hit your co-worker’s shin really hard with a robot, will be closely monitoring your progress.
There are two highlights of my liveProject series that I think can make it interesting for students:
The author’s insights build on my expertise working in the past four years as a consultant, dealing with a platitude of robotic platforms (more on this in the next section)
Mentorship - if any student gets stuck in a project, they can reach out on the chat to get help from me
Series Structure
I love the modularity that comes with ROS. Thanks to it, I was able to structure the course into the following sections that make logical sense:
With the above projects, each consisting of three to five milestones, the work should be divided into manageable tasks. My idea at the time was that each of the milestones should take at most one evening to implement, and I hope I achieved this goal.
Resources
A project is as good as the resources contained within
Me, right about now
Since the idea behind the LiveProjects is to provide resources to students so that they can complete the project themselves, it’s essential to find quality resources. Fortunately, right before I started working on the series, Andreas Bihlmaier began working on his book Robotics for Software Engineers. Andreas does a fantastic job explaining robotics concepts, I mean, take a look at the image below:
Since both of our projects are with Manning, I can link to Robotics for Software Engineers throughout my liveProject series. Additionally, students get a couple of months of access to the book when they purchase a liveProject
On rare occasions, I could not find materials that would explain some concepts easily enough. In such cases, I wrote the introductions myself or created a dedicated blog post in one case.
Author Insights
As I mentioned earlier, the author’s insights are my favourite bits since they allow me to share some experiences from the field. Here is a sample from one of the milestones in the Sensors and Sensor Fusion liveProject:
Almost every client I have had that was working with mobile robots had some issue with an IMU. These insights will be quite long, but building intuition about IMUs will help you build quality robots. I will have some insight to offer in the next milestone as well.
Transformation frames
If you’ve gone through the previous project (Simulate a Robot), you will remember we discussed coordinate frames. You might remember that for a typical robot platform, you would expect to have an x-axis pointing forward, y-axis pointing left, and z-axis pointing up.
The thing with sensors is that they will always report data in their local coordinate frame, so you might find an IMU that, when in a default position its z-axis is pointing down. (Let’s say that the x-axis is still pointing forward; this means that the y-axis points to the right).
The first thing we need to take care of is to make sure that our imu_link has the same orientation as the orientation of the IMU coordinate frame (in this case rolled 180 degrees around our robot’s x-axis).
This situation will get tricky when you start analyzing raw data. Since your IMU data will be referenced in the IMU frame, this means that if your robot rotates counter-clockwise it will report a positive angular velocity around the z-axis, but your IMU will report a negative velocity! This is totally fine as long as the imu_link correctly describes the orientation of the IMU coordinate system.
Any system that takes in this velocity will need to look up the coordinate transform between the base_link and the imu_link.
Vibration
A good rule of thumb is to isolate the vibrations physically. Ideally, you should put a rubber pad or thick double sided tape between the IMU and your frame to dampen the vibrations between the frame and the IMU.
Even though you could filter the IMU data in software, I would recommend always trying to solve the problem in the physical domain first whenever dealing with sensors or actuators and only then start looking into the issue through software.
More insights on IMUs are coming soon in the following milestones!
Statistics
Here are some statistics on the project series that you might find interesting:
Months from project start to release: 7
Working hours to deliver liveProject: 177.5 hours
Working hours spent on project mentorship so far: 9 hours
Total number of text for the whole project series: 34,019 words OR 234,120 characters OR 98 A4 pages (font size 10)
Total numbers of commits in my project repository: 146
Number of certificates granted so far: 2
Number of students that signed for the free project so far: 258
Number of students that signed up for the follow-up projects: 97
The Difficulties
One thing I did not figure out in this project series, and I would be super grateful if anyone has any ideas for a clean implementation, is handling a consistent code base along multiple projects. We are building up on the same code base from the second project until the end. Each of the milestones adds a bit of new code or configuration, and when I started, I was copying the source code between milestones and appropriately providing partial or full solutions for each of them.
The above means that if there is a bug in the first milestone of the second project, I would need to manually copy the fix over to all the other milestones (I did it twice already). Perhaps a cleaner solution would be to use a branch per project milestone, but this way, I would need to apply any fixes to up to 16 branches, not really reducing the complexity of this operation.
If you have any thoughts on this, please let me know. If you would like to create a project like this, I suggest you have a good think about this issue before you start.
Outro
Dribot navigating through waypoints in a simulated apartment
This project was quite a ride. The main challenge for me was consulting close to full-time and then also working on this series. With the help of Manning Staff, outstanding Reviewers and Implementers, I delivered what I think is a solid ROS2 project series for beginners who would like to learn how to use ROS2 for mobile robots.
Updating the whole series to work with Gazebo Fortress and ROS2 Humble is still on my plate. Hopefully, I will be able to deliver this summer.
That is all that I have for this update. Happy roboting!
In my previous post I’ve shared some of my experience working with Septentrio Mosaic X-5 dev kits. After seeing some good results with that hardware I’ve decided to try to use them with some other hardware to realise a prototype that I had in mind for quite some years. In this post I’m going to describe what I did to get a first prototype working and share some tips for anyone who would like to replicate them.
The idea
I’ve been interested in developing a proof of concept system for mapping (either using SLAM or other methods) for at least 7 years now (it might be slightly related to the fact that I was developing something similar for my master thesis). Since I’ve had a chance to work with RTK GNSS units (firstly with ArduSimple and then with Septentrio’s solutions) the logical next step was to start integrating more sensors. Before we get into the nitty-gritty details and the final demo I run let’s take a look at the first prototype of the idea:
Indoor scanning
The design
Here is the list of hardware that I had access to for this project:
I’ve received Mid-40 from Livox over 2 years ago and described my initial thoughts in this blog post. Having a neat scanning pattern was an interesting feature for the prototype. With a single plane LiDAR, I would have to move the prototype quite a bit to gather data, with Mid-40 I could instantly tell if the data was good because I would immediately see the features in the scans.
Xsens MTi-630-DK
MTi-630-DK mounted on the prototype frame
Xsens was very kind to lend me an evaluation unit of MTi-630-DK for my demonstrator, even though the initial phase of the project took me way longer than anticipated. The MTi-630 is an Attitude and Heading Reference System (AHRS) as it runs on-board sensor fusion algorithms that estimate absolute 3D orientation, in this blog post I’m using IMU and AHRS interchangeably. The main feature I was after in the IMU/AHRS was as precise globally referenced heading as I could get. The better the AHRS the less angular drift I would expect to see in my data.
In the video I’ve shared in the previous section you can see me testing the first prototype in a room running just the MTi and the Mid-40. I used double sided-tape to attach the unit to the top of the LiDAR, created a simple URDF file with correct offset between frames and voila! By slowly rotating the LiDAR in place I was able to scan the room. Let’s take a look at it again:
Indoor scanning
Do you see an issue with the 3D map being created? As the LiDAR is turning left you can notice that the new points appear shifted with regard to the points that were initially captured.
Bad map!
In my hastily prepared prototype, I assumed that the Mid-40 origin is in the centre of the LiDAR, while according to the docs the origin of the LiDAR is flushed with the front face of the unit. Oh well, it’ll be fixed in the next iteration that will include the next sensor.
And if you are thinking now “hey, Mat, won’t placing the sensor so close to some moving parts, that are undoubtedly magnetic and surely inside the LiDAR, affect the sensor readings?” then you are right. Even though I couldn’t see it when looking at RVIZ data, much later I noticed that turning on LiDAR affected the magnetometer reading that was fused by the AHRS for the orientation estimation.
Septentrio Mosaic X-5
Septentrio Mosaic X-5 Dev Kit
I’ve used Septentrio dev kits in exactly the same way that I’ve described in the previous blog post. Just as a quick recap: one unit was functioning as a base station, sending corrections to the rover unit that I’ve mounted on the prototype. All exchanging information through WiFi.
Having very precise location information is the core problem to solve for this prototype. Another approach that could be used would be to try to run SLAM, but this would require more processing power and most likely a LiDAR with a more repeatable pattern and higher field of view.
Putting it all together
Hardware
Here is how I connected everything up when it comes to hardware:
Simplified hardware architecture of the system
I’ve mounted all the components on a frame built from 2020 V-slot profiles, making sure I have enough room for anything I might want to add in the future:
First prototype (before moving IMU to the bottom frame)
The LiDAR and the Router were both powered off a single 3S LiPO battery, while the GNSS unit and the IMU was powered from my laptop’s USB ports.
There are two issues with this setup:
I planned to use my laptop for processing and could not be bothered setting up a smaller processing unit
The unit weighs too much to be comfortably carried for long periods, even if a 2nd person carries the laptop
The best thing about this setup was the flexibility for mounting things. I had enough space to keep adding any hardware I might have needed or wanted to try out. After all, my only goal in these experiments was to prove the concept.
Software
For my prototype, I’ve used ROS Melodic, since that’s the version I’m still mostly using, and I had it on my machine. Something I love ROS for is the existing packages and libraries. What I think is interesting, is that for the prototype I didn’t need to write any software, I was just able to put together a bunch of existing packages by having the right configuration (perhaps having a good idea of what I’m doing helped too).
ROS nodes I've run for a proof of concept
To make testing easier I’ve created a xacro file that defined all the dimensions and components, together with their position. Bein able to visualise the setup made testing easier as I could double check the state estimation matches reality:
Sensor placement in urdf/xacro
This data on where sensors are with respect to one another is used throughout the system. Not only it allows to accurately represent the PointCloud in RVIZ but it also is used by EKF nodes for checking the relative positions between elements.
The localization is a classic ROS ekf stack described in detail on these pages. Running this EKF allows us to get an estimated position of the robot in a fixed coordinate frame (map or odom). Setting the Fixed frame to map in RVIZ then allows us to visualised all the LiDAR points as you can see here:
An OK mapping run
This is one of the 2 mapping runs I’ve run with this hardware, with a hand-tuned heading offset. This result is exactly what I need to prove the concept. If you know Pareto principle I firmly believe that in 20% of the time, I’ve shown 80% of the system functionality. The remaining 80% time required is a solid grind, with lots of tuning and field trips to create something viable.
Lessons Learned
I’ve learned a tonne in this project, so naturally, there is some brain dump:
V-Slot 2020 profiles are amazing, if you work with them I highly recommend 3D printing or sourcing some caps that you can place on the profile ends. They are quite sharp, without caps you don’t want them anywhere near surfaces you care about
Start work with some computer that will run everything and have a small screen, running everything on the laptop, and carrying a heavy prototype is not a great idea
In my experience so far, every trial takes me between 3-5 hours, mostly because I’m in the city, and quiet places with good views of the sky are hard to come by. If you are using ROS then record bagfiles and use them for tuning the system (especially localization and IMU integration)
Use checklists - on one occasion I had all the cables I needed by pure luck. I highly recommend using a checklist for field packing and performing experiments. Ensuring your GNSS unit is connected to the router when testing will surely save you some debugging time as well!
Further thoughts
For a project like this timing is everything. Both the LiDAR and the IMU that I’ve used support sync input, while Septentrio’s Mosaic can easily be configured to provide sync output. Instead of using EKF as I did, perhaps the data could be used directly with very little sensor fusion. This would probably be the approach I would have taken if I was developing a handheld module.
Instead, I’m way more likely to put this kind of hardware on a mobile robot of some kind, making sensor fusion a much more likely requirement as the precise position and orientation would be used for other aspects than mapping.
Next steps?
Right now I don’t have any plans to pursue this project further as it is. I’m glad that I was able to prove the concept but I don’t have a use case for such a device. I’ll use these learnings in future robot integration projects. If someone wants to build off the work I’ve described here for an open-source project then I’ll be more than happy to help out, but for now, it’s time to focus on other ideas that I have in the pipeline!
Quite a while ago I’ve received two units of mosaic development kits from Septentrio. This blog posts sums up my experience with it and provides some insights into integrating these with ROS.
First impressions
The first thing that you notice when unpacking the module is the size of the carrier board at 10x16 cm it’s quite large, however, the core module is only 7x5 cm.
I don’t think I’ve ever used a positioning system that would be that simple to set up. This video that is less than 2 minutes explains the basics on how to connect to the module. The gist of it is you connect the receiver antenna, attach a USB cable and navigate to the local webserver, hosted by the module in your web browser (192.168.3.1) and poof the interface is there:
Septentrio Web Interface
Need to set up the module to output NMEA sentences on a USB port? Simple! Go to NMEA/SBF, select connection type (USB), desired serial port, message types (e.g. GGA, RMC) and interval you are interested in and you are good to go. The dev USB port on Septentrio (the micro-USB port on the carrier board) creates two serial ports that you can use on your target machine. Being able to configure UDP or TCP streams is also an interesting option.
The base station-rover setup is very easy as well - the instructional video has less than 3 minutes, once you know what you are doing this setup likely takes way less than a minute.
What is also worth noting is the number of carriers that are supported. In my test the base station was receiving position from 4 systems: GPS, GLONASS, Galileo, BeiDou:
Ground station status page
Testing
Hardware setup
A mount I 3D printed to attach mosaic dev kit to tripod and hold antenna
To run some integration tests with ROS I’ve decided to make two tripods, each carrying a Septentrio mosaic-X5 kit, antenna, battery and a wireless router. One of the tripods is used as a base station, while the second one is used as a rover (I’ll carry this one in hand when testing). Additionally, the rover has an IMU with a magnetometer attached next to the antenna.
Base setup
As I mentioned in the previous section I’ve set up an NMEA USB stream for my tests. To do this I created a new udev rule for the modules (the full workflow being similar to the one described in my static USB tutorial):
I’ve set the two MikroTik routers to PTP Bridge mode, making sure the base station is outputting correction on TCP port and that the rover module is subscribing to them.
ROS setup
ROS setup is quite classic for mobile robot setup using navsat_transform_node, robot_localization, imu driver and navsat_nmea_driver. Let’s go over the most interesting bits of my test setup.
Navsat driver
I’ve decided to use the nmea_navsat_driver for reading NMEA data from Septentrio through a serial port. The reason I opted for this is the simplicity - I could set it all up and be testing in no time. Or so I thought until I’ve discovered that nmea_navsat_driver has this thing that will prepend the frame_id you provide it with /. This in turn breaks the latest version of robot_localization. This seems to have been fixed in Noetic but is a wontfix for Melodic.
Localization
Since for quite a while I’ve wanted to create a handheld device for some data capture (hopefully more info coming soon) I’ve decided on the following assumptions:
Single EKF - for any mobile robot setup you would most likely use a dual EKF setup but since I don’t have any sensor providing continuous measurements in planar axes a single EKF instance should be sufficient
IMU fusion for orientation and heading - could be useful in the future when I start pointing my setup at things
WGS84 -> fixed frame transform - I’ve set up robot_localization to publish this transform so that mapviz would display my ‘robot’ in the global frame
Test results
For this blog post I’ve performed two experiments:
Static test - both rover and the base are placed in a static location for 15 minutes, then for around 10 minutes we run the localization stack and observe changes to the local position
Dynamic test - trying to trace a pattern drawn on the ground
If you are a robotics engineer and not getting enough sun exposure then I highly recommend testing GNSS modules, this setup allows for some proper vitamin D boost:
I'm really glad I bought camping equipment at one point of my life
Static test
At first, I was thinking of setting up a 10x10cm grid in mapviz and test if the base frame in the local coordinate system ever moves outside the grid cell during the test. Boy, was I pessimistic…
The test I actually performed was launching the robot_localization, causing the local frame to be at the initial position of the rover receiver, and letting it run for around 10 minutes without touching any tripods. Here is the X and Y position (thanks PlotJuggler!):
Graph with X and Y position change over time
As you can see in the graph, throughout the test the position didn’t significantly move. The lowest measurement on the above graph is -0.010895 m (that’s < 1.1 cm). The ground I’ve set up on wasn’t flat and it was quite windy. I have no idea if these factors could cause the module to shift slightly but the result is amazing as it is, working on wheeled-mobile robots I would not need higher precision anyway.
Covariance recorded during the static test
The covariance output from nmea_navsat_driver looks a bit higher than I would expect from a unit with an RTK fix. I will need to check how it’s calculated as the high values of covariance could be an issue when fusing in wheel odometry in later stages of the integration.
What is interesting in the static test is the precision of height data that is not far away from what’ve seen for XY-axes:
Relative height captured throughout the test
Dynamic tests
The dynamic tests I performed suffer from one issue: I don’t have any reference information to compare the measurements against. For having the absolute idea about the quality of measuerements some proper geodetic methods should be used (for example a total station).
For this test, I traced a roughly rectangular path and walked around it carrying the rover unit. The measurements won’t be very consistent as I was holding the whole rover setup in hand while walking the marked path. Here is the GNSS odometry position:
GNSS pose in local frame
The data looks very good, I believe once covariance is addressed this setup should pretty much work out of the box on any mobile robot as the global EKF providing map->odom transform.
Closing thoughts
When I mentioned Plug&Play in the title of this blog post I wasn’t kidding. I like how Septentrio made it easy to work with these modules. Everything I needed to set-up was explained in the videos, with these tutorials rarely exceeding 3 minutes. The quality of support and documentation that you get from Septentrio is also top-notch.
At the same time there are some features that I will be looking forward to testing in the future:
Using SECORX positioning service and/or NTRIP service integration for corrections
Upgrading the firmware on Septentrio and running some more test on increased update rate (so far I’ve been outputting position at 10 Hz)
Eventually testing mosaic-H with dual antenna setup for receiving heading information
Now, what would be a really, really interesting test? Taking this setup, adding a quality IMU and a LiDAR unit to it, creating a very precise 3D mapping module.